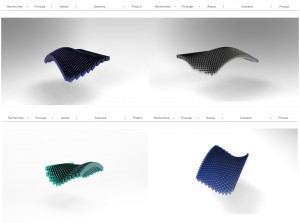
wire+ fresnel+ couleur+motif
halo paramétrique texture +motif +couleur
halo texture soft +couleur + motif
wire+ fresnel+ couleur+motif
halo paramétrique texture +motif +couleur
halo texture soft +couleur + motif
Je travail sur le logiciel de sculpture et de peinture Mudbox. Ayant mis en place des protocoles sur le logiciel (des suites d’actions que je répète) afin « d’abimer » mes modélisations, j’ai décidé d’élargir mon propos. J’oriente donc mon travail vers une notion plus globale d’interaction entre le temps et internet.
Quels sont les effets du temps sur mes modélisations? Comment le réseau peut il les faire vieillir? Quelle va être la patine qui en résulte?
Je vous conseil la lecture de cet article de Stephane Degoutin (un professeur de l’ENSAD) relatant de cette notion de temps et de mémoire d’internet. (Fouillez aussi ses autres articles, très documentés et forts d’un regard personnel).
Jacques
Read MoreLa couleur inséré dans le processus de génération de formes
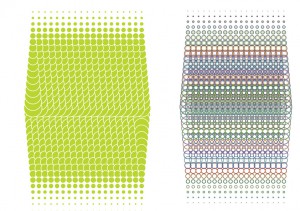
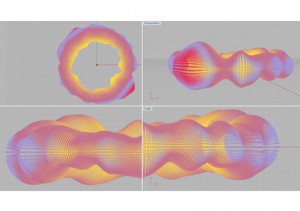
Grasshopper, logiciel de modélisation paramétrique, hiérarchise ses tracés. Même à partir de répétitions 2D, Il y a un dessus et un dessous. Ici, la couleur révèle l’organisation.
Quel impact la couleur peut-elle créer sur la compréhension d’une surface?
Elle lui donne un volume, une texture, une température, en somme de la matérialité, une présence.
Les paramètres pouvant influer sur la couleur peuvent être :
Le volume
La courbure
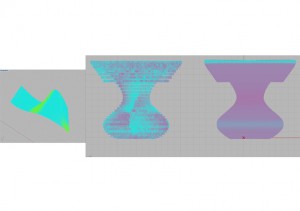
La distance avec un ou des points
Read More

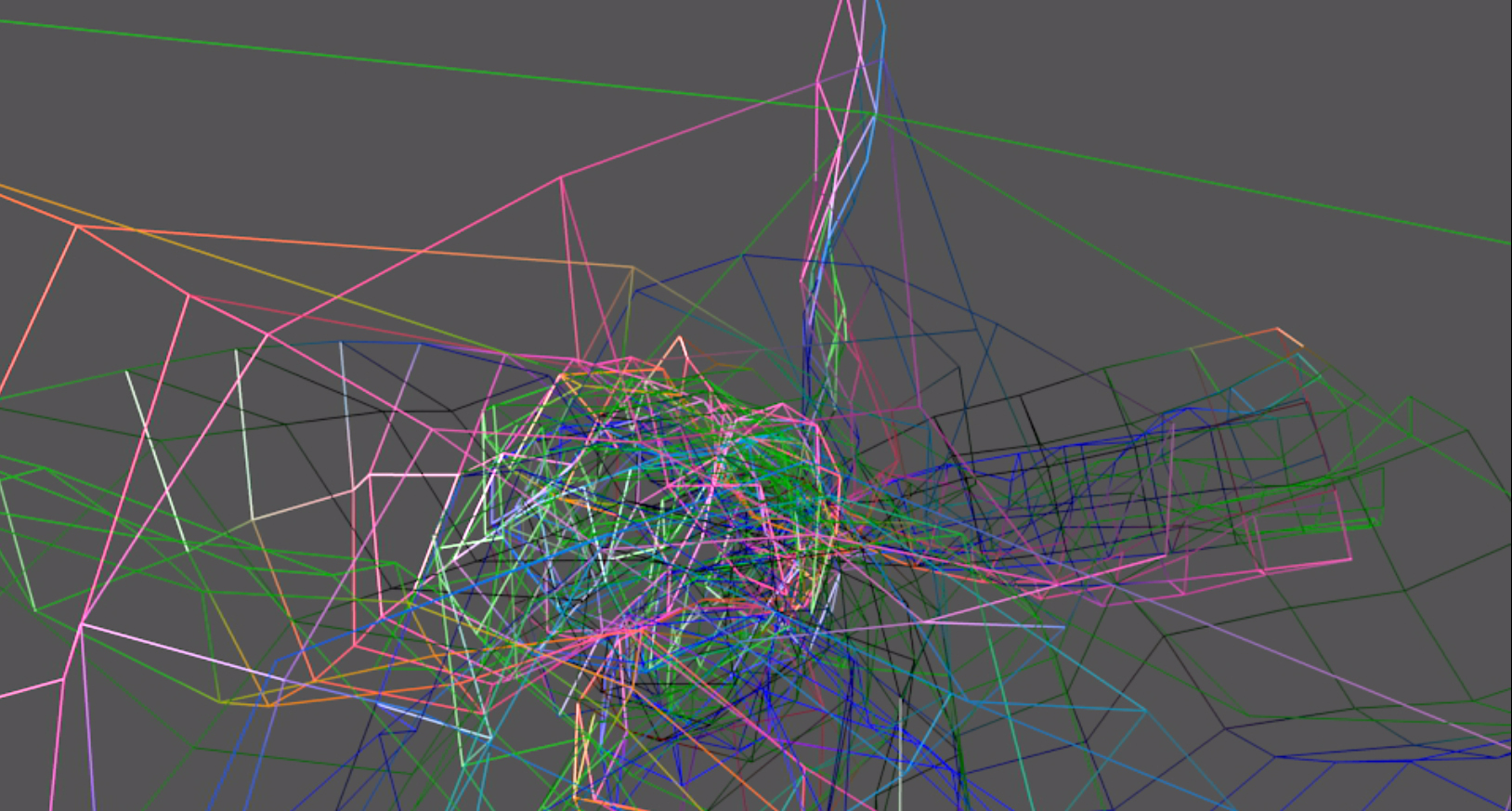
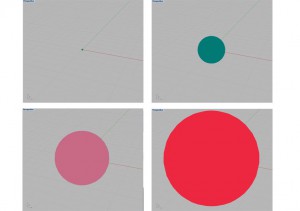
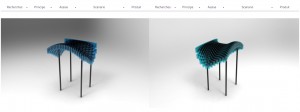
Un solide primaire est découpé en fragments transparents qui vont croître chacun à leur tour en subissant des rotations. La superposition de ces couches de transparence permet de voir naitre un solide informe dont les contours sont flous. Mon intérêt se porte sur l’effet visuel d’une masse dense obtenue à partir d’objets immanents.
J’aimerais soulever la question de la frontière de l’objet numérique.
Ma piste revient à chercher des processus de génération de formes qui seraient moins définies en utilisant des couches transparentes par exemple.


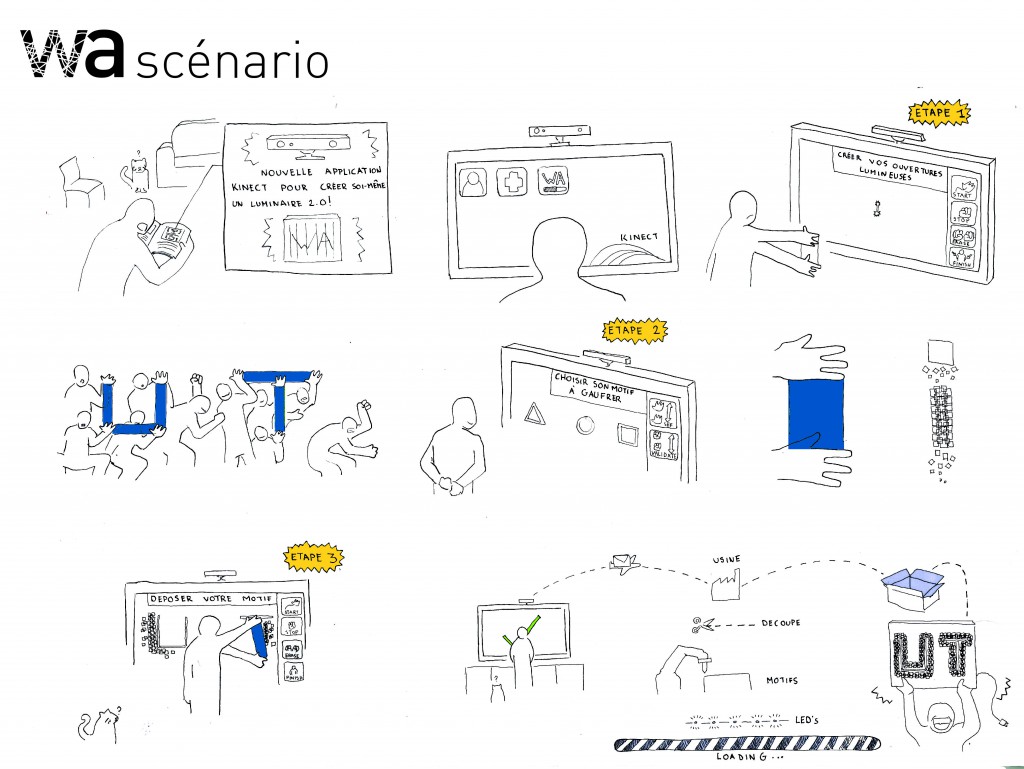
Suite à la présentation que nous avons fait en présence d’un représentant de l’entreprise ABB, il s’est avéré que nous devions bien faire la part des choses entre l’objet que nous pourrions réaliser avec les moyens que nous avons à l’école, et le scénario que nous imaginons.
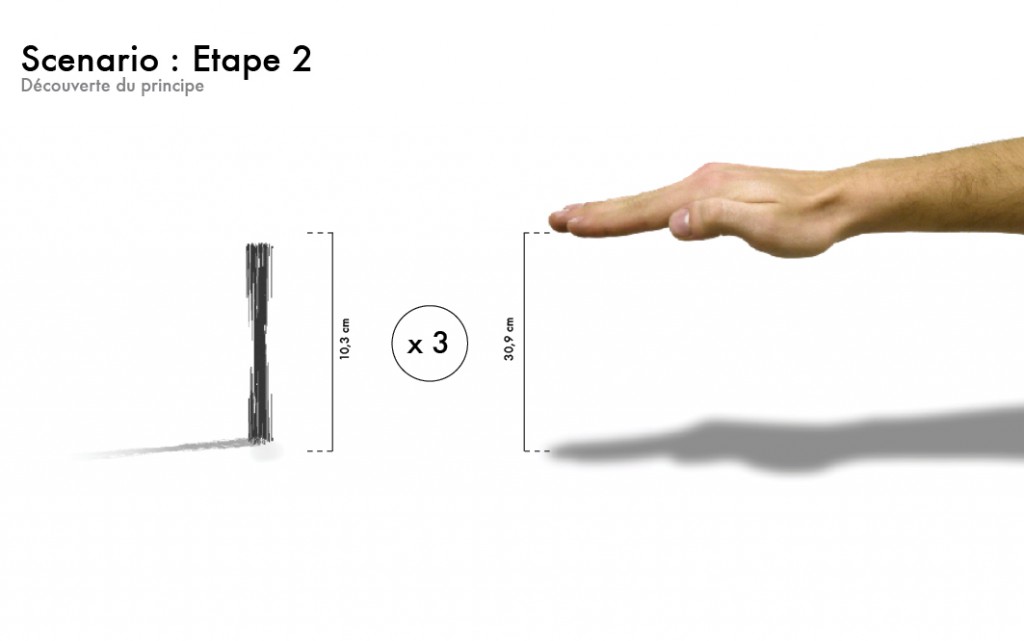
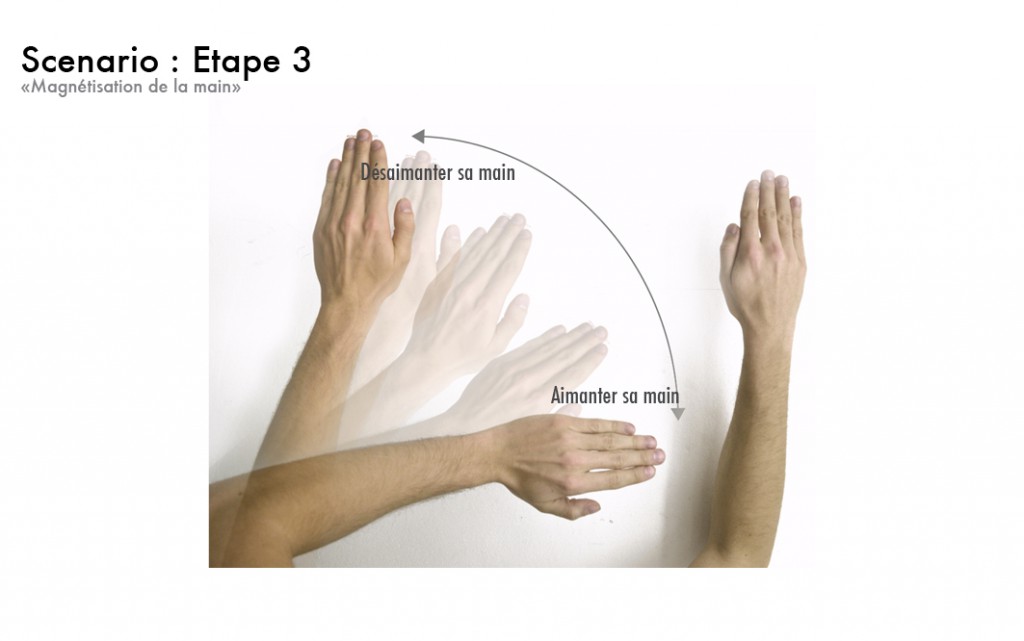
La première phase de réalisation se déroule donc face à KINECT. Apres un didacticiel, on est en mesure de jouer avec l’interface afin de modeler le paysage souhaité à savoir un paysage magnétique, un relief modelé virtuellement par l’utilisateur et réinterprété par le robot sous la forme d’un objet.
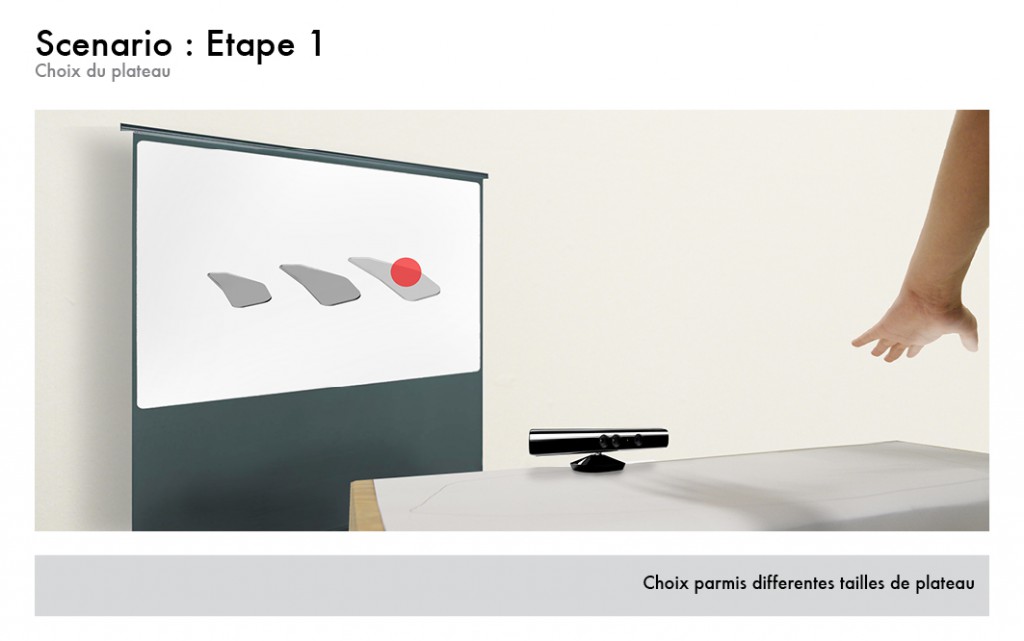
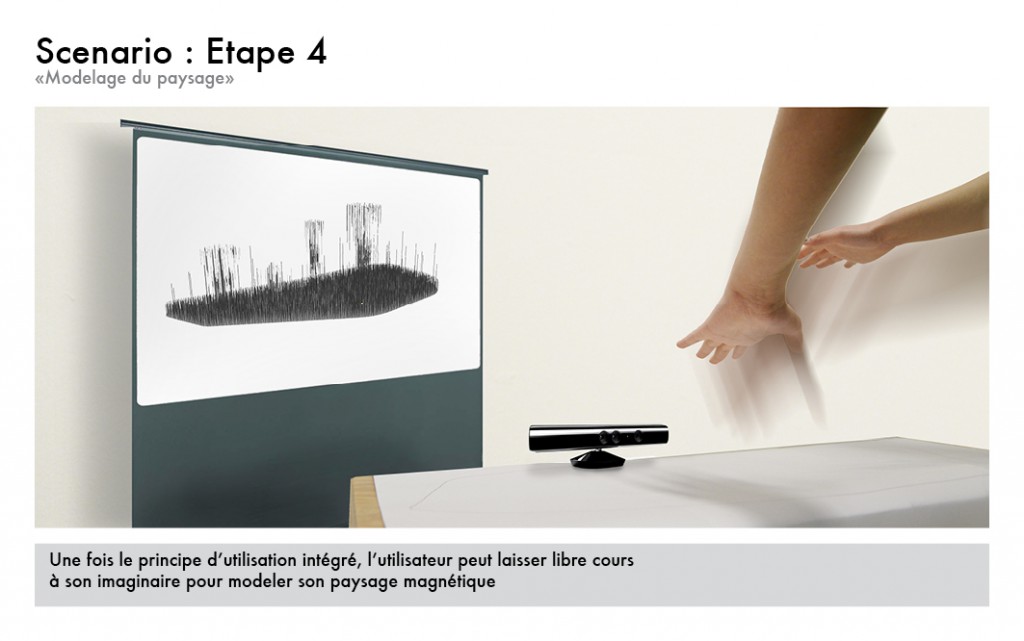
Il est apparu évident que nous ne pouvions nous cantonner à la création de « pieds »; mais que nous devions nous orienter vers un scénario plus complexe permettant une plus grande richesse formelle.
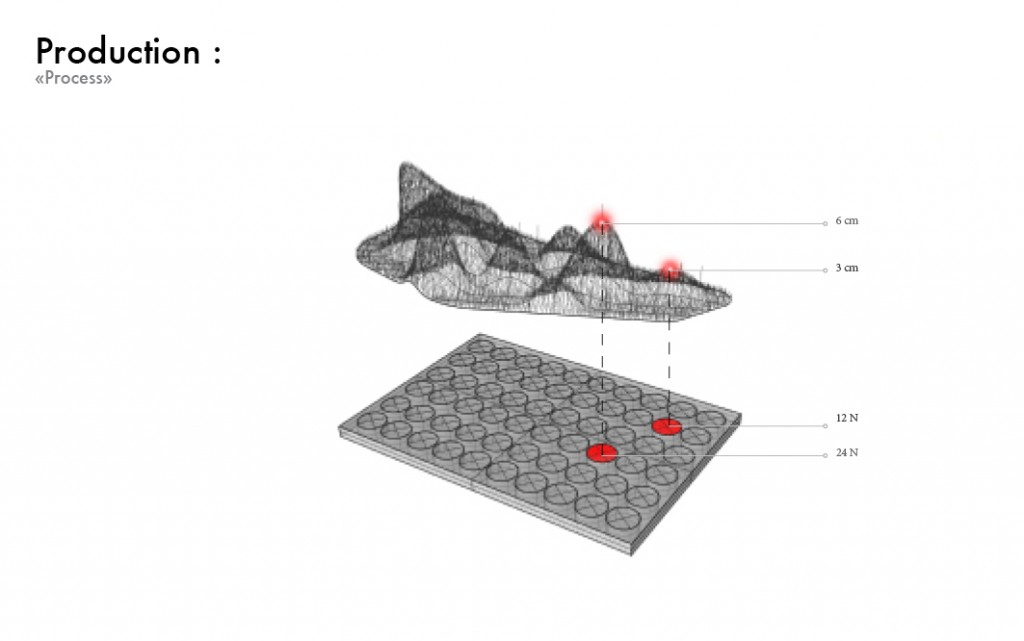
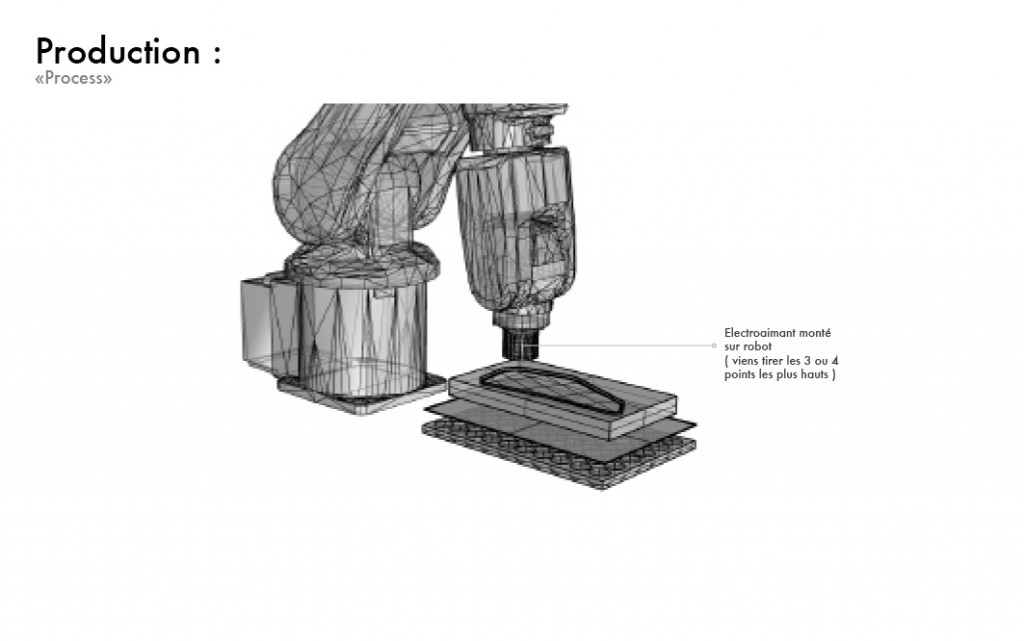
Pour cela, en plus du robot, un tapis d’électroaimants est placé sous le moule dans lequel est généré l’objet. Ce dernier va permettre de créer des pics de différentes hauteurs en fonction de la puissance fournie par chaque électroaimant ( celle ci variant proportionnellement à l’intensité du courant qui le traverse).
Deux possibilités sont envisageables pour la suite du process:
-Soit le robot, muni d’un électroaimant fait plusieurs passes au dessus du moule afin de tirer les pics à la hauteur voulue, et si cela ne suffit pas (problèmes de solidité et de stabilité ), le robot vient generer une ou plusieurs colonnes sur un même plan afin d’assurer la stabilité de l’objet.
-Soit le robot est lui aussi muni d’une matrice d’éléctroaimants qui va venir au contact de la matiere et qui en fonction de la puissance de chaque electroaimant crée soit des pics soit des colonnes reliant les deux surfaces (« les pieds » de l’objet)

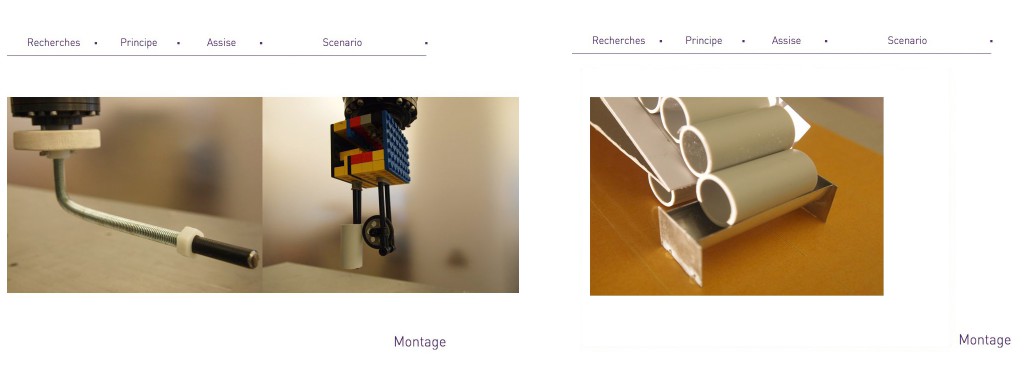
Premier test réalisé à partir d’un moule à gateau en silicone.
Read More











Un robot est, par définition, une conception de l’homme. Il en reste donc dépendant, malgré tous les efforts des concepteurs pour le rendre de plus en plus autonome.
Cette dépendance est patente dans l’exposition « L’homme créa le robot ».
Je prendrais comme exemple le bras robotisé qui assemble des briques Lego, qui m’a interpellé par sa proximité avec notre projet de construction par accumulation.
Le guide fait remarquer à juste titre que « si on déplace une brique, le robot s’arrête ». Plus exactement, il va essayer de poursuivre une construction, défectueuse ou impossible du fait de la pièce manquante, car il a été programmé pour assembler des éléments préalablement et précisément positionnés dans un espace donné. Le robot sait ou se trouve chaque Lego car on le lui a dit.
On imagine aisément les limites, s’il s’agissait d’assembler un grand nombre de pièces.
Il m’apparait évident que la capacité de la Kinect de reconnaitre les éléments, par leur forme ou leur couleur, va nous permettre de nous affranchir de ces limites.
Nous pourrons ainsi éviter de simplement remplacer une laborieuse tache d’assemblage par une laborieuse tache de programmation.
Il apparait que le robot, qu’il soit d’ordre industriel ou domestique, s’est toujours orienté d’un point de vue cinétique a imiter les mouvements de l’hommes, mais quelles sont les possibilités du robot lui même ?
Par rapport à la première vidéo, il apparaît que la taille de l’élément fini – ici le légo – à une influence sur la durée totale de la construction du volume, il y a donc une relation de proportionnalité entre ces deux paramètres : c’est a dire que plus l’élément fini est petit plus la durée d’assemblage de ceux ci sera longue et inversement.
Par rapport à notre problématique, il apparait que le choix de l’élément fini, dans sa géométrie et sa taille, sera prédominant sur le projet et induira le temps de production de l’objet, et pose aussi la question de la préhension de cet élément, sur les deux vidéos, le premier robot utilise un pince, le deuxième une ventouse, qu’en est – il pour nos éléments fini ?
Jeremie & Charlie
Read MoreAu départ, nous avons choisi 2 grandes directions :
La première s’oriente sur le moulage d’objets texturés, notre positionnement se base sur la complexité de réalisation des moules industrielles : fraisage dans des blocs d’acier massif et finition puis à l’acide.
Ainsi l’opportunité de projet se situe dans la simplification de ces moules en utilisant un système de patronage de formes dans des matériaux peu coûteux et faciles à usiner : carton gris, polycarbonate, plexiglass et de les texturer afin d’éviter plusieurs étapes de conception.
Moules en polycarbonate
La deuxième se concentre sur l’accumulation de produits finis ou semi-finis pour générer des objets .
La typologie d’objet obtenue dépendra du produit semi fini utilisé.

A l’image de différents projets réalisés :
1) Interlaced stool and coffee table de philipp aduatz ; 2) Pencils Sculptures de Jessica Drenk et Lionel Bawden ; 3) Miss-maple de Elisa Strozyk ; 4) Fijiji blocks #1 de Eduardo Benamor Duarte ; 5) The Evening Line de Greg Lynn ; 6) Design Mutation de Delolindo ; 7) Pushpin Portraits de Eric Daigh
8 ) 6302 spoons de Najla el zein

En conclusion, il apparaît que la première hypothèse nécessite trop d’étapes de conception. Le principe du moulage ne permet pas de déterminer une typologie d’objet ainsi qu’un assemblage pertinent. Du fait d’un grand nombre de possibilités de moule et dans le contexte du Fab Lab la première piste ne permet pas de générer une typologie d’objets précise et donc ne dégage pas un point du vue pertinent.
Du coup, la suite de nos recherches suivra donc la première deuxième piste qui s’avère être plus pertinente et offre plus de liberté mais aussi ferme un cinétique plus proche du Fablab. L’accumulation suit un principe de répétition adapté aux possibilités d’action du robot : précisions, régularité, et temps d’actions supérieures a celles de l’homme.
De là, s’offre à nous deux positionnements :
1) On part de l’objet final et on trouve un élément (fini ou semi-fini) correspondant et cohérent à la typologie d’objet choisie.
2) On part d’un produit semi-fini, et on trouve une typologie et des paramètres qui en découlent .
Read More