

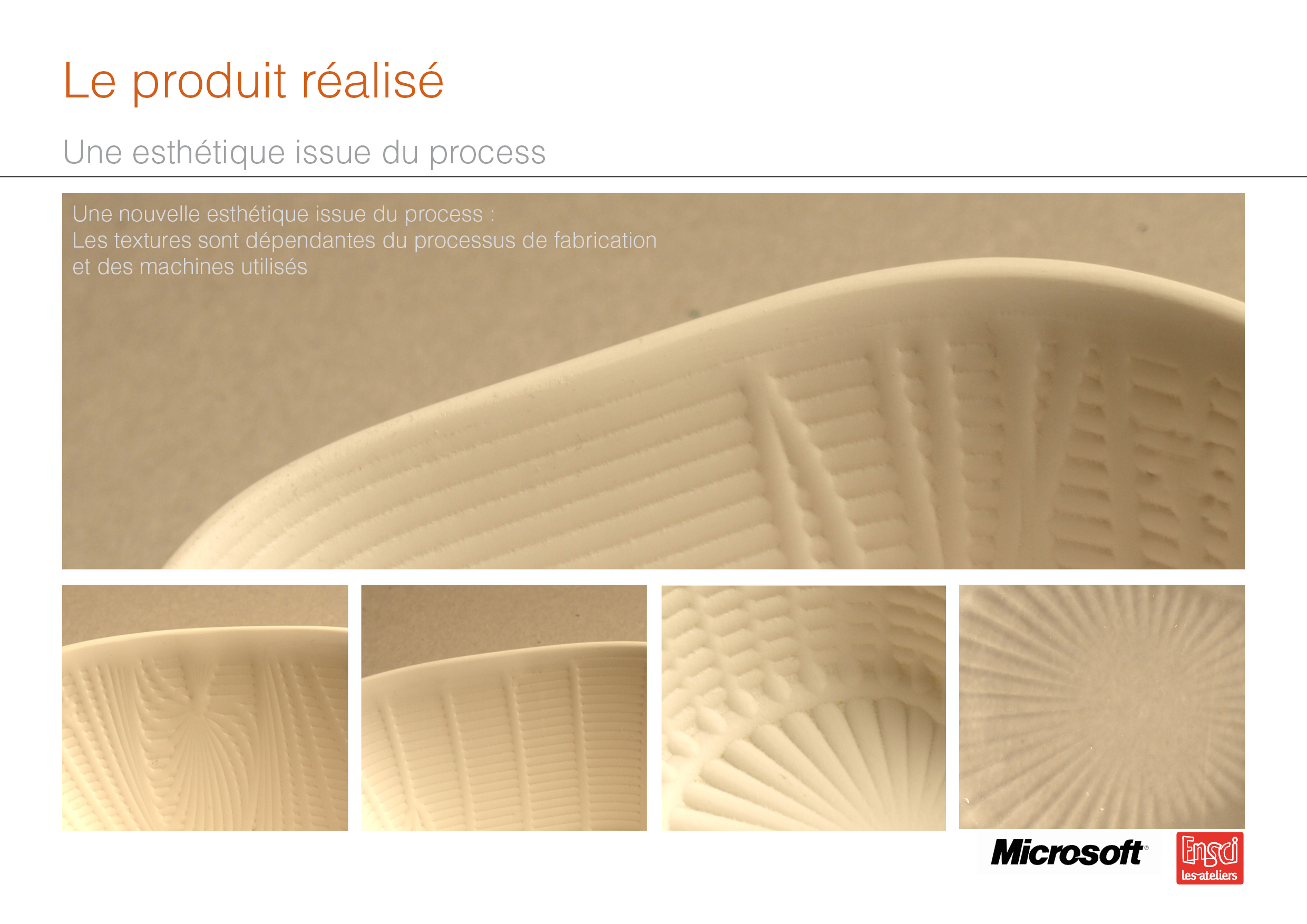
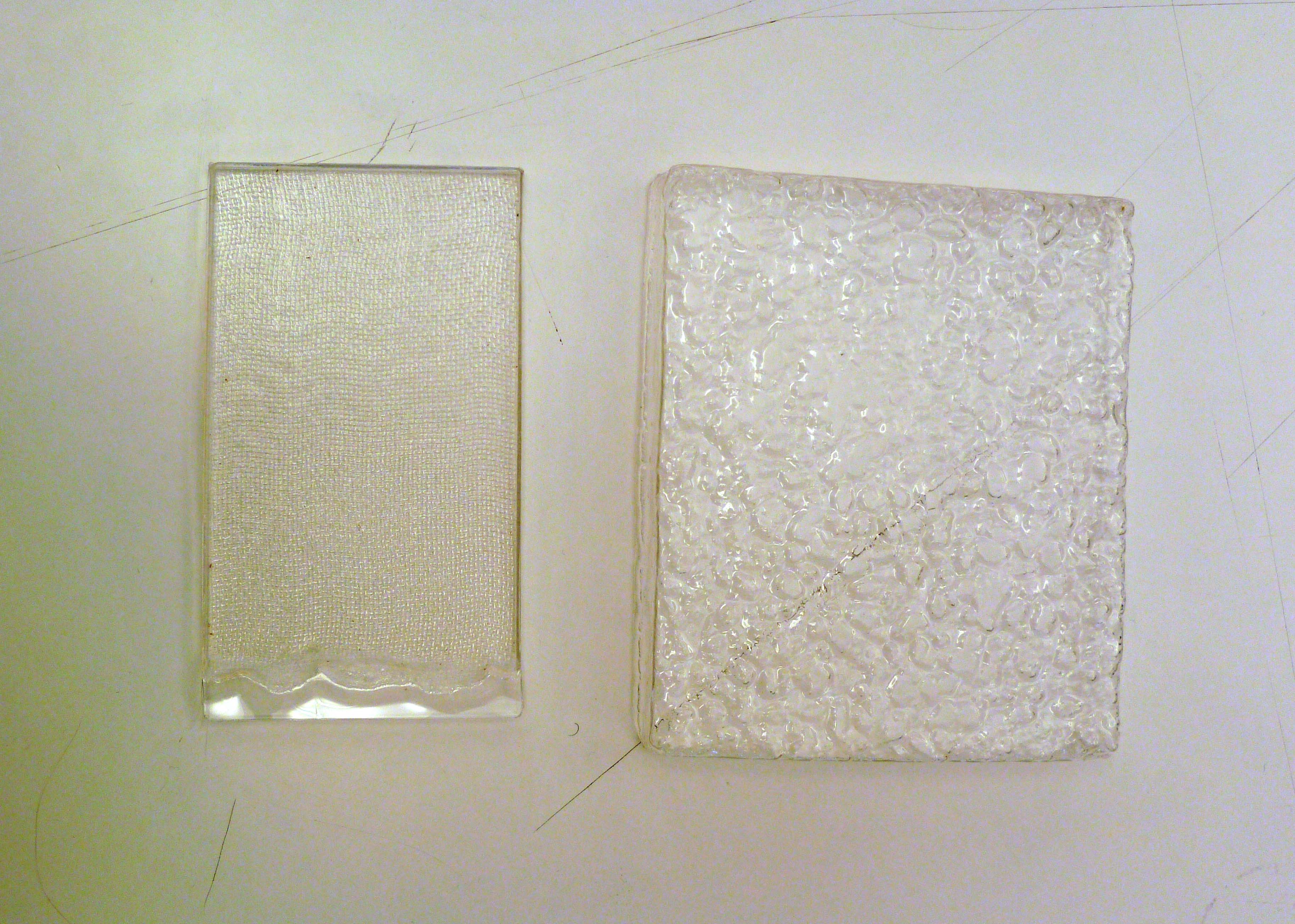
Les qualités de textures des matériaux contemporains tendent à s’appauvrir alors qu’une
diversité des matériaux émerge depuis un demi siècle. Les surfaces lisses, uniformes
représentent désormais largement les objets de notre quotidien. En outre, le travail de
surface d’une matière s’avère être une technique dont usent les artisans pour anoblir leurs matériaux de travail et ainsi leurs produits. Pour ce projet, nous avons donc eu à coeur
de réintroduire sur des objets une diversité de textures.
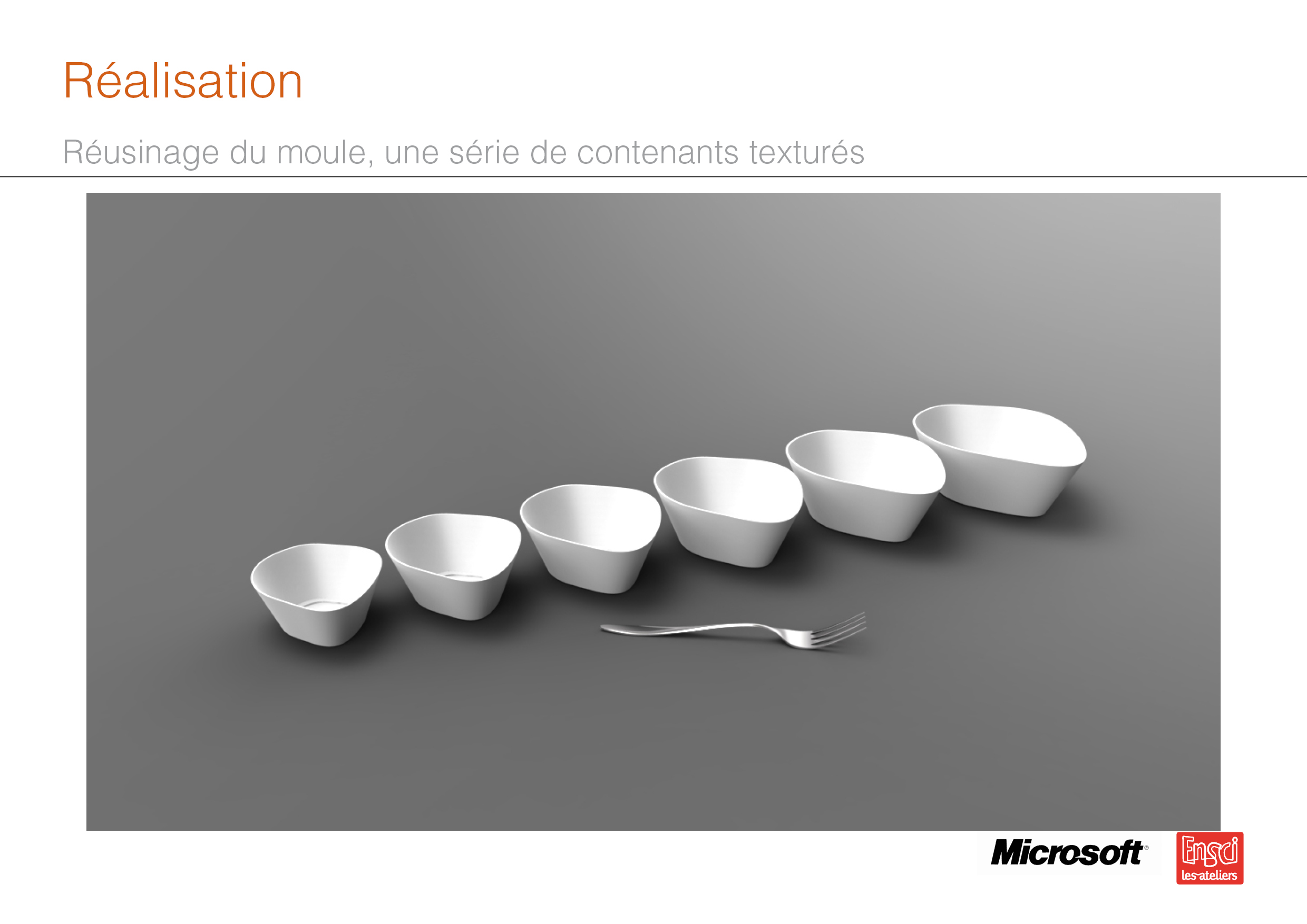
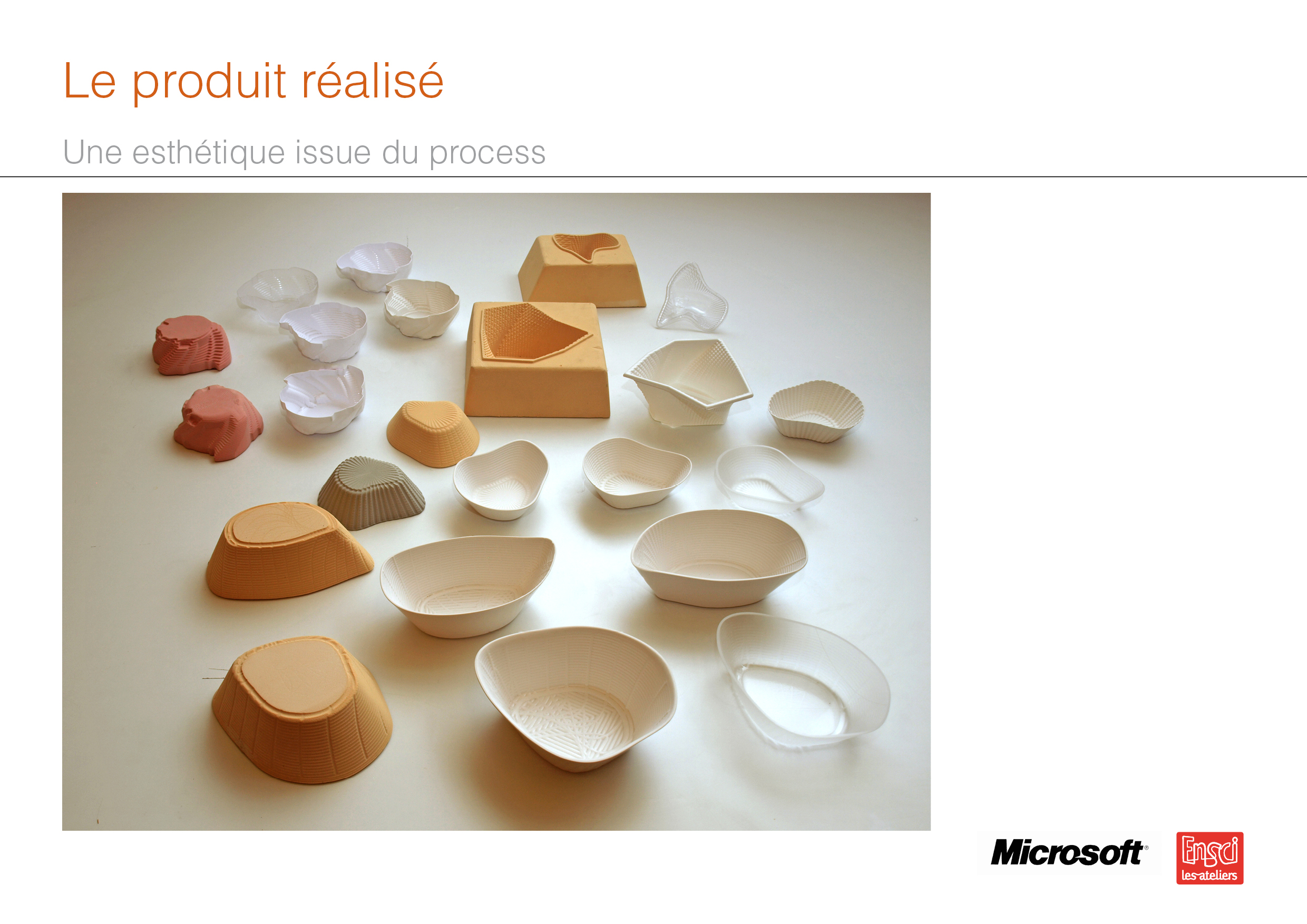
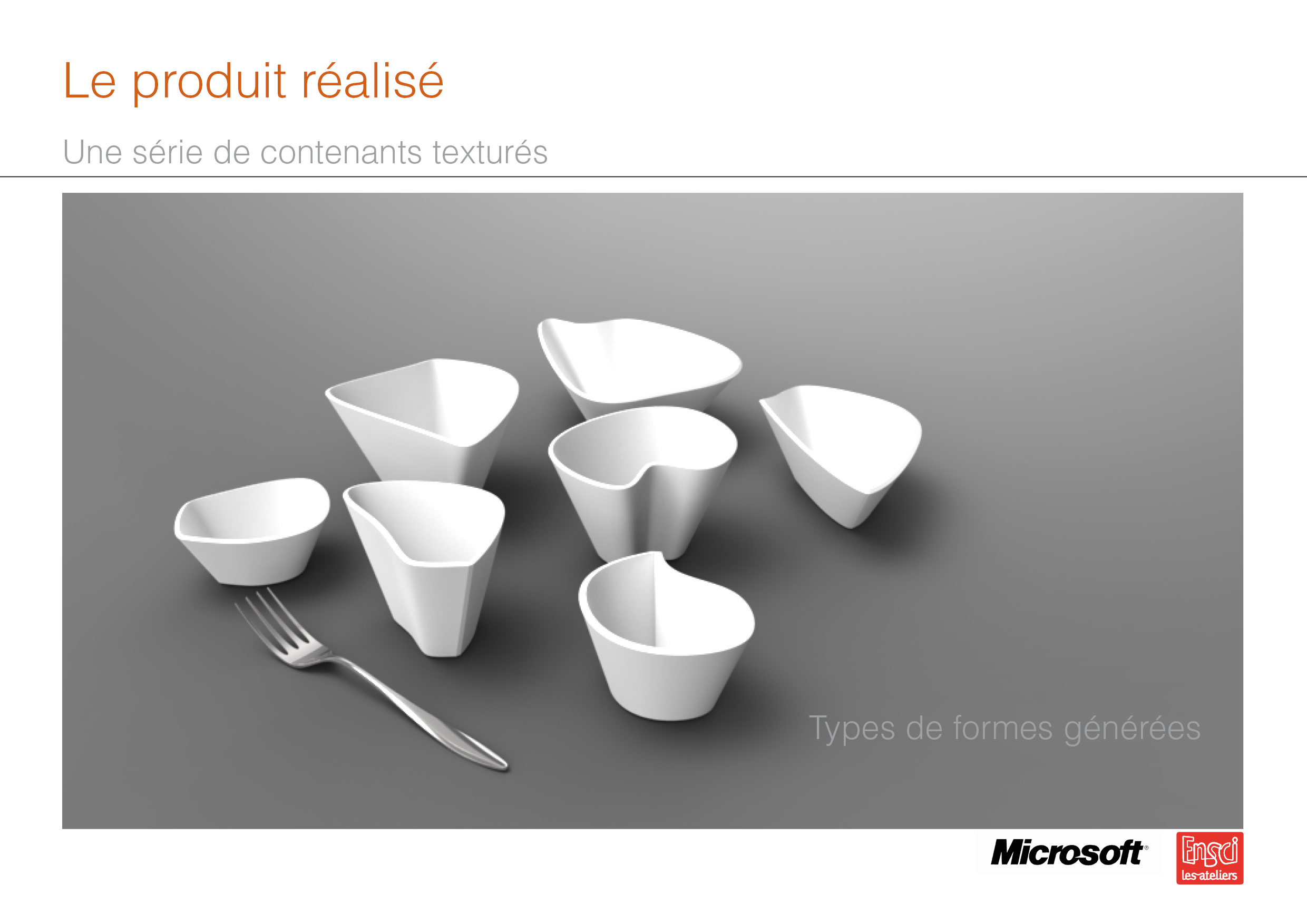
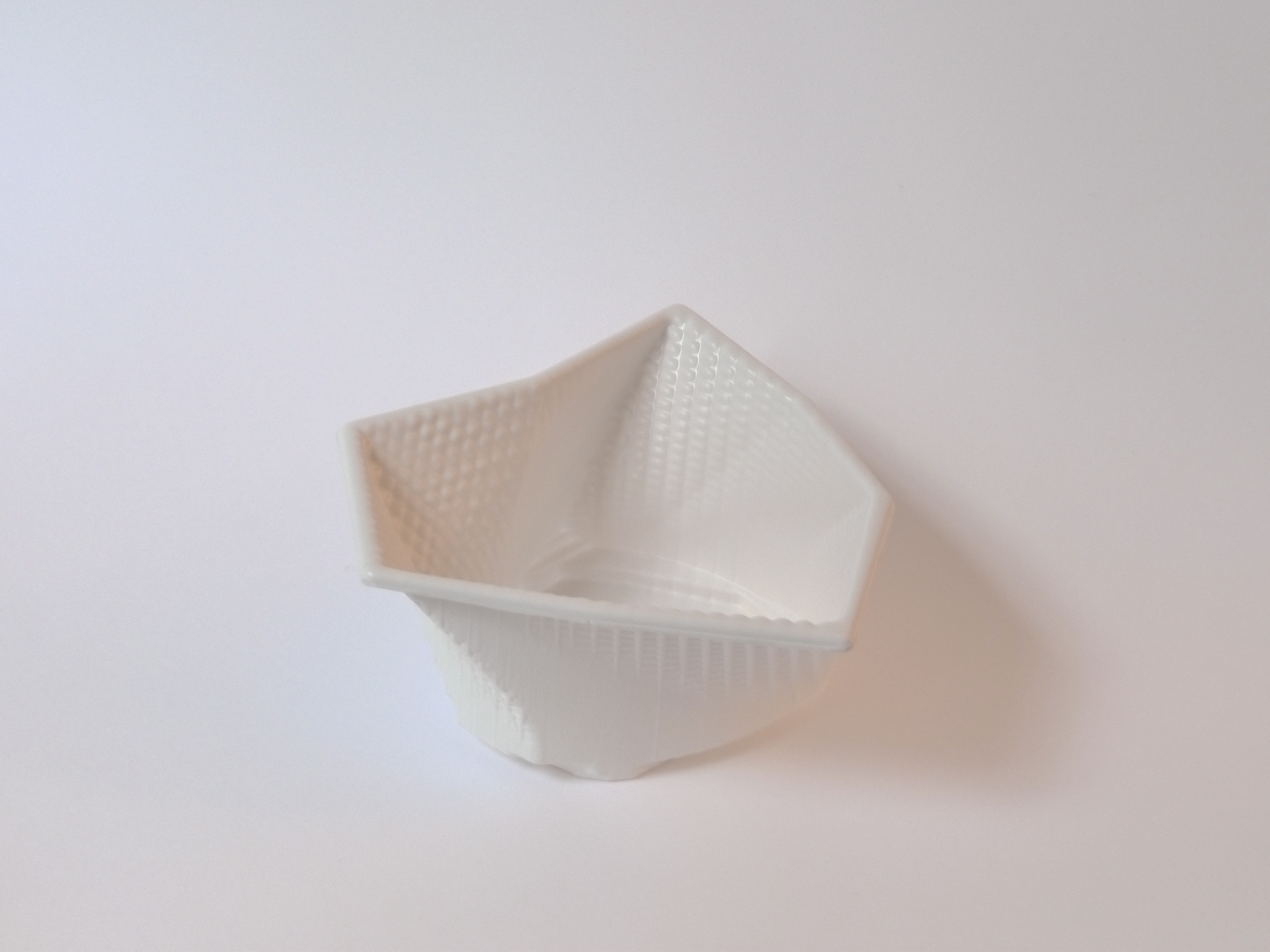
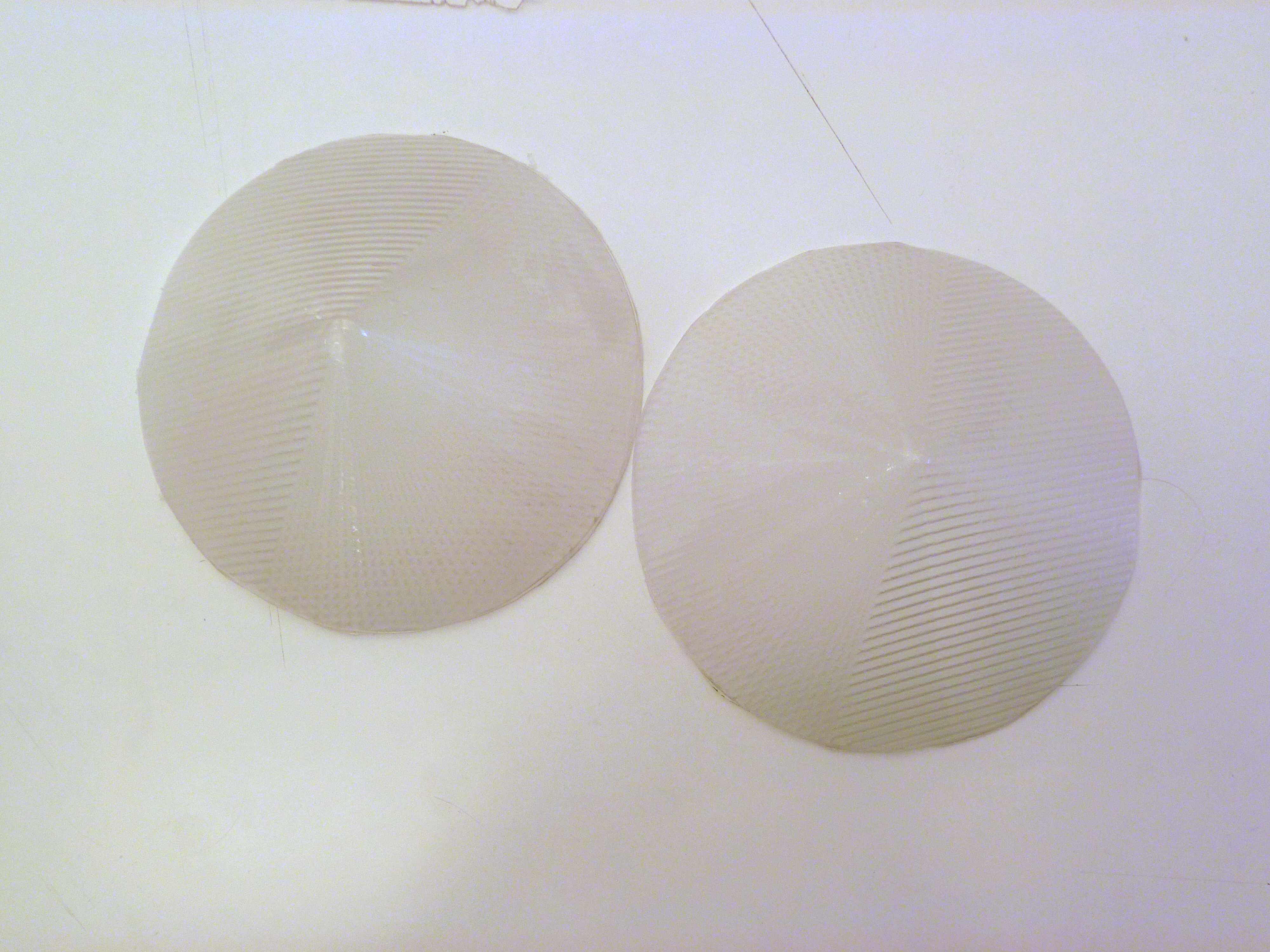
Nous avons envisagé notre dispositif avec Kinect comme un moyen d’aboutir simplement à la modélisation de textures. Nous avons ainsi exploité les propriétés de mise en forme de la matière plastique, plus précisément de l’ABS. Ce matériau alliant résistance et compatibilité alimentaire est sollicité dans notre projet pour incarner une gamme de contenants destinée aux arts de la table ( bols, coupes, plats…).
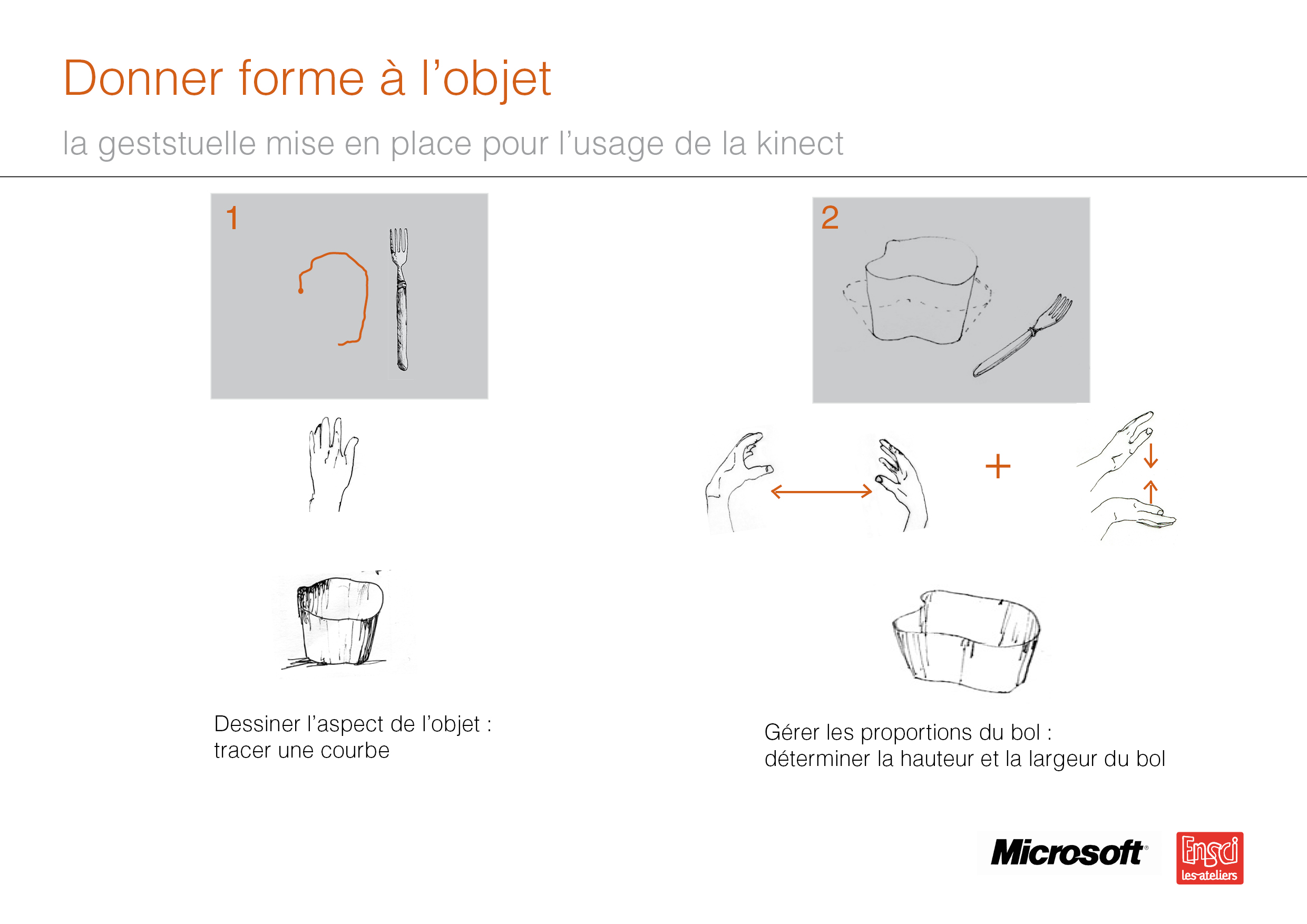
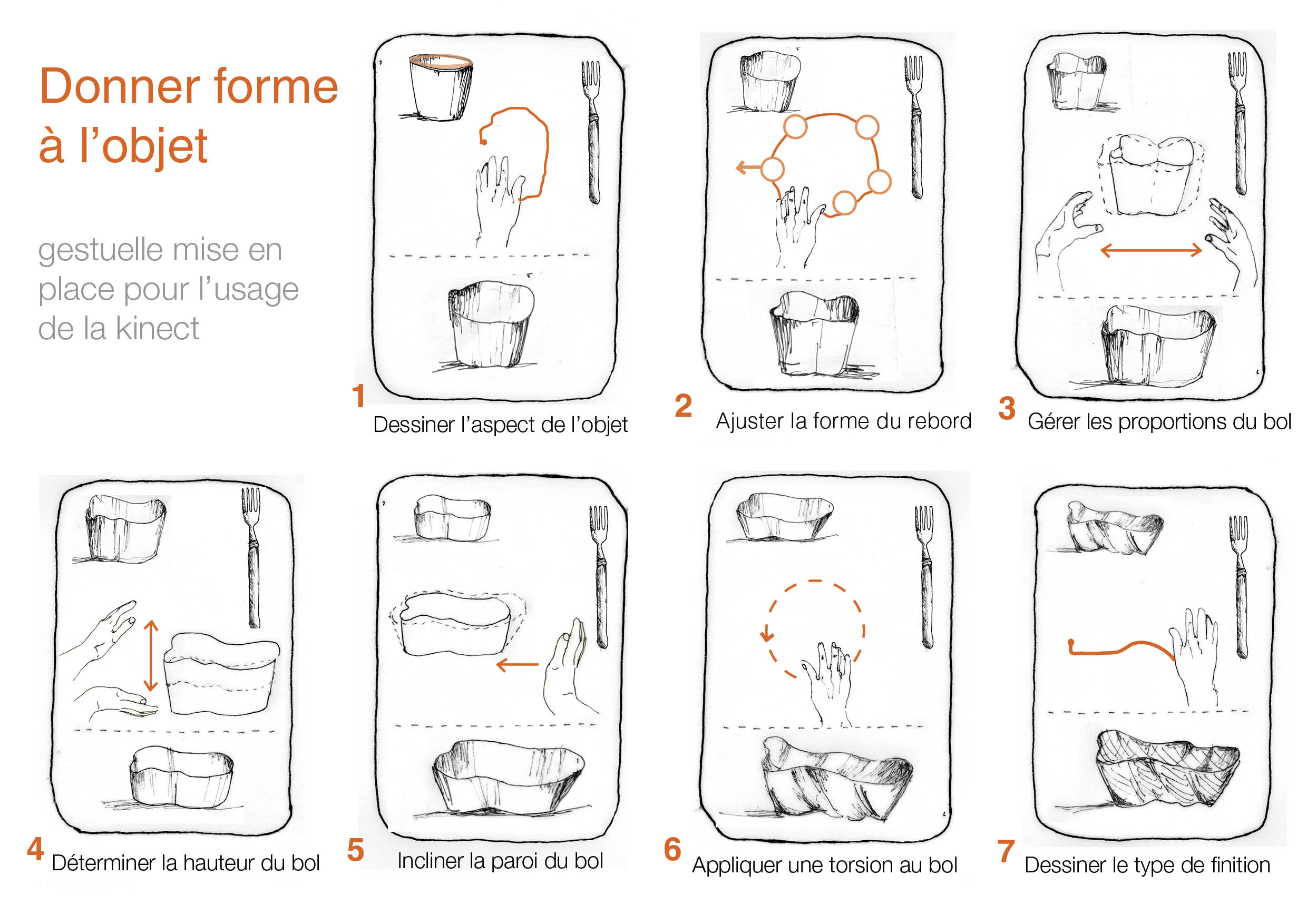
Le corps se fait ici outil, il joue successivement le rôle de modélisateur de formes,
de volumes et de textures. Il est aussi sollicité sensiblement pour éprouver le rapport
tactile propre à l’objet.
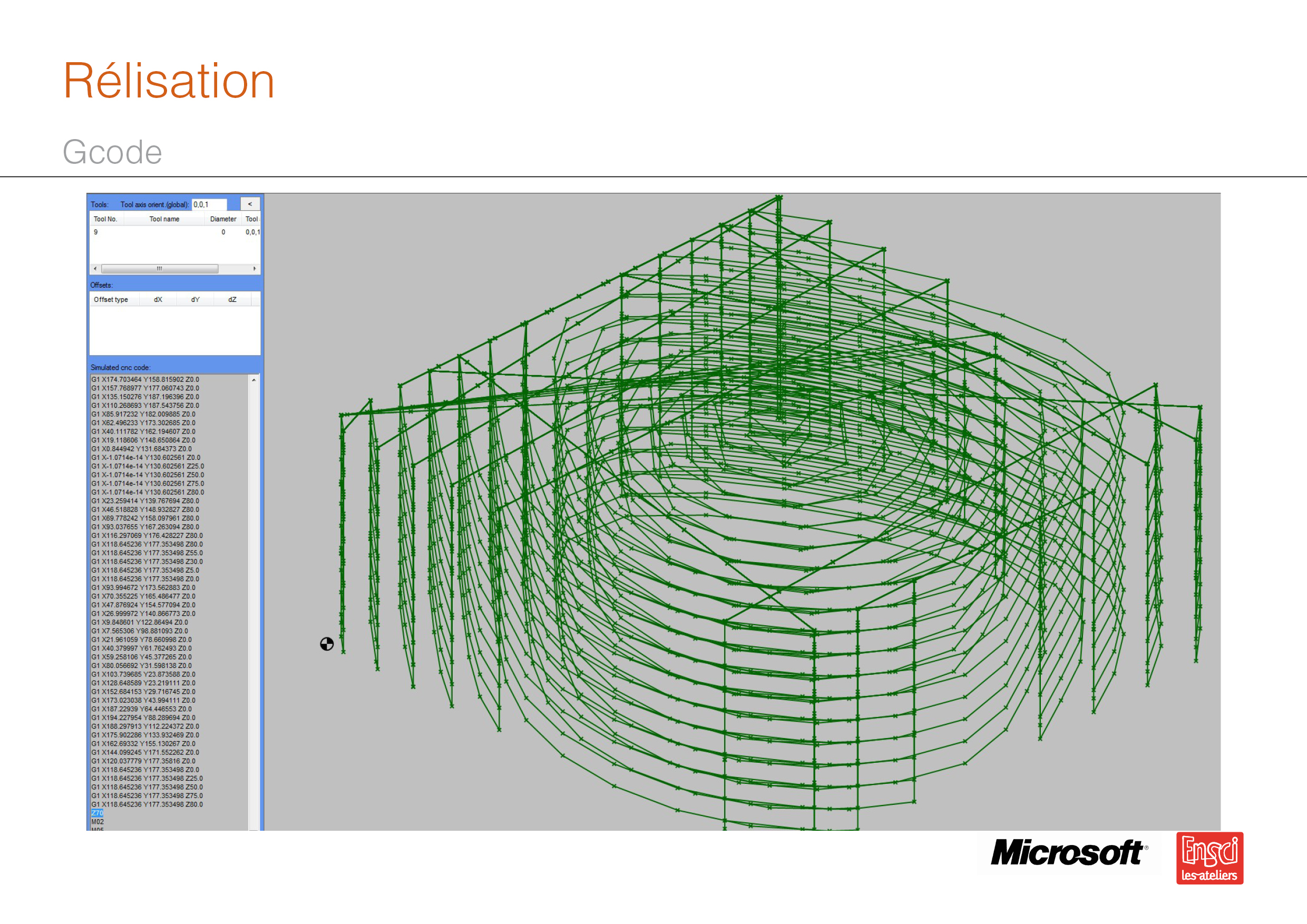
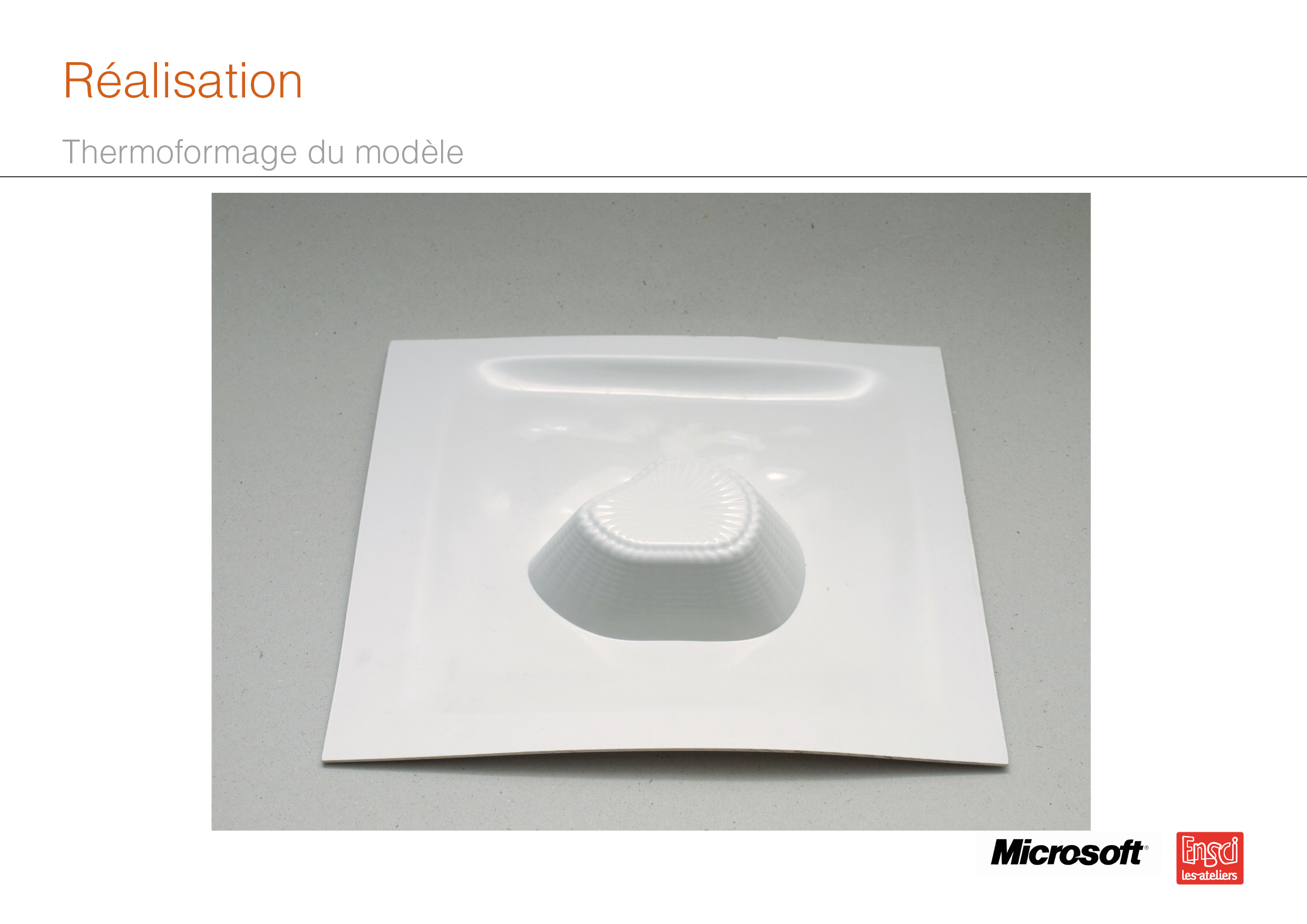
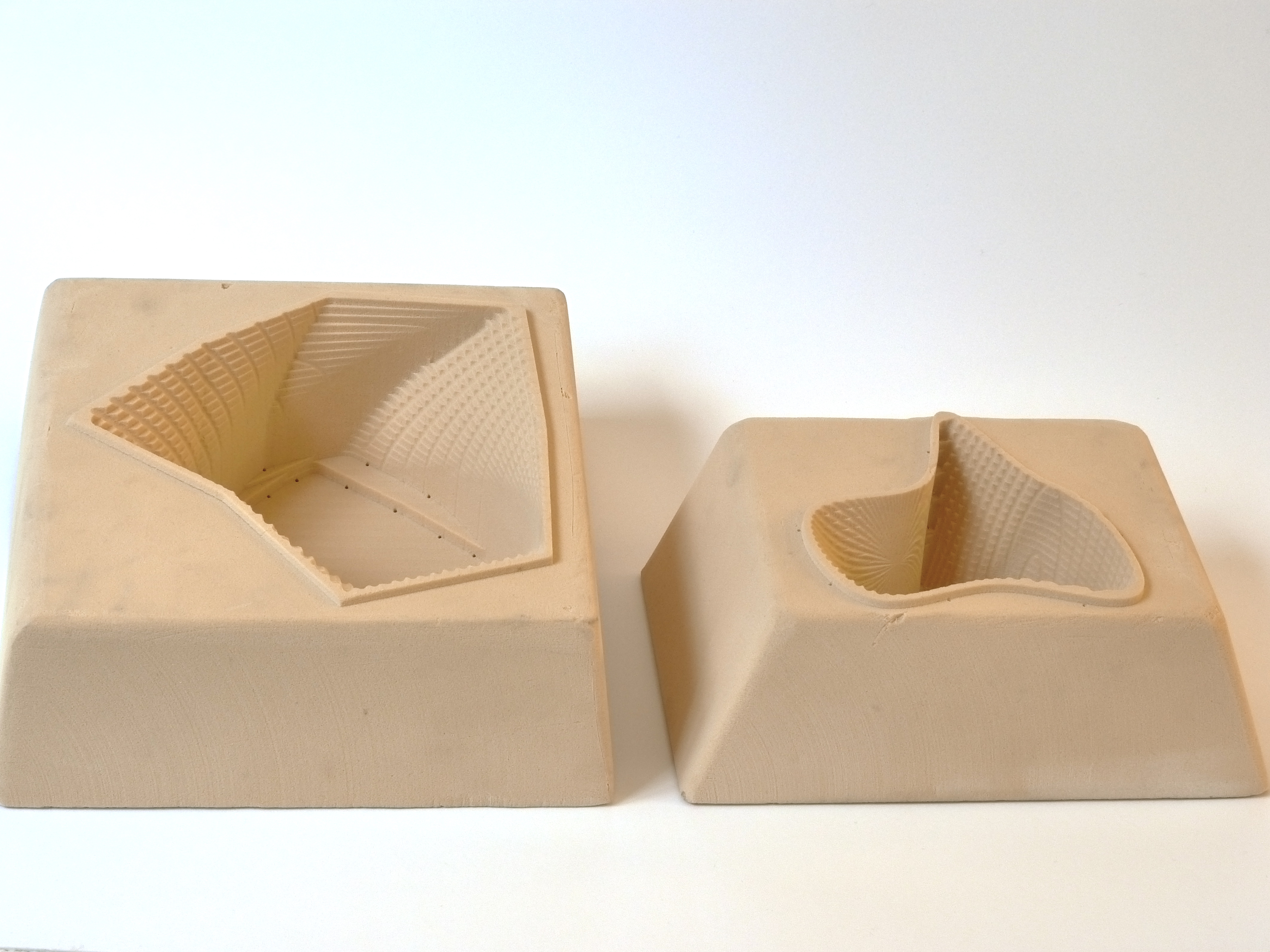
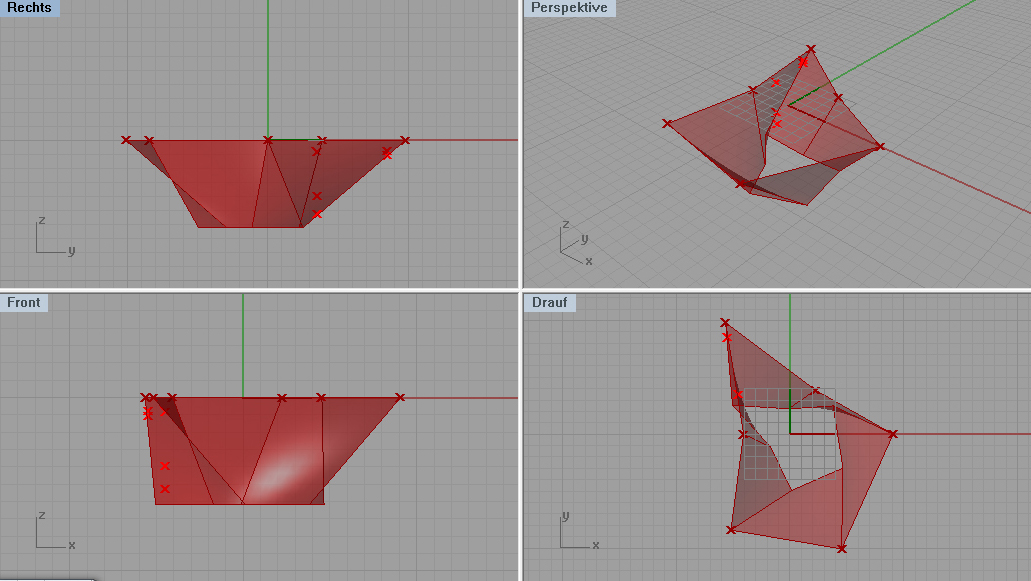
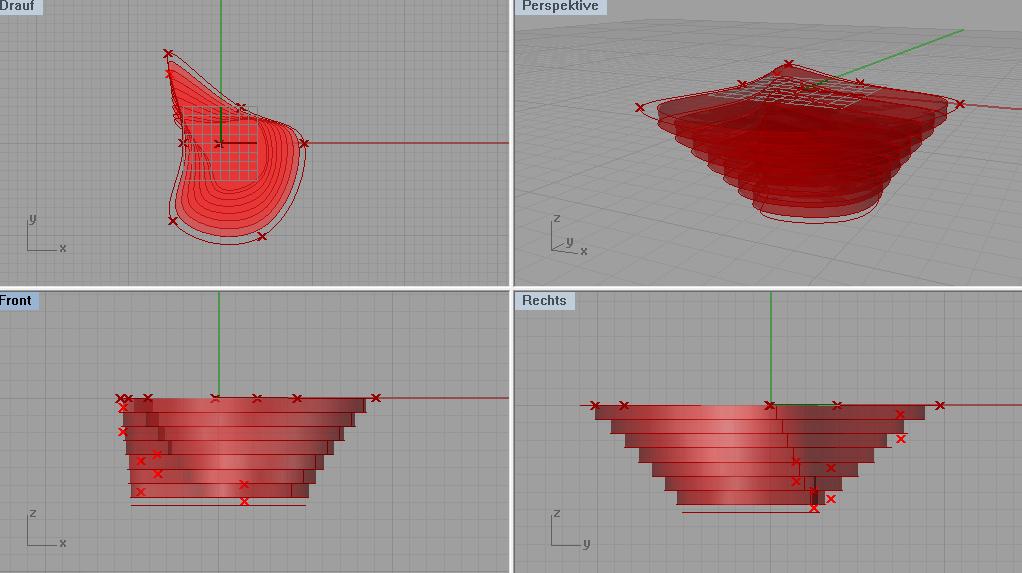
Deux temps majeurs se distinguent dans l’expérience du dispositif: en premier lieu une étape de formalisation d’un contenant où intervient la technologie Kinect dans la captation de mouvements de l’utilisateur; en second lieu la réalisation du contenant dont le moule est fraisé à partir des données numériques ( propre à chaque objet modélisé ) puis thermoformé .
La conception et la réalisation des objets évoqués se veut abordable par un large public et le Fab-Lab offre un contexte optimal pour mettre en place ce dispositif d’apprentissage de techniques et de prise en main d’outils, aussi bien informatiques que techniques.
Hugues Couverchel – Svea Hillenbrand
projet réalisé à Ensci -Les Ateliers en partenariat avec Microsoft
Read More

















{kind=link}