
Test de Griffin et Sebastian
1









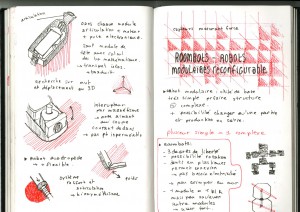
 Un abri qui se module en fonction de la position du soleil.
Un abri qui se module en fonction de la position du soleil.
—————————
Dans un contexte d’espace confiné. On peut imaginer des Roombots qui se modulent selon les besoins de l’utilisateur.
—————————
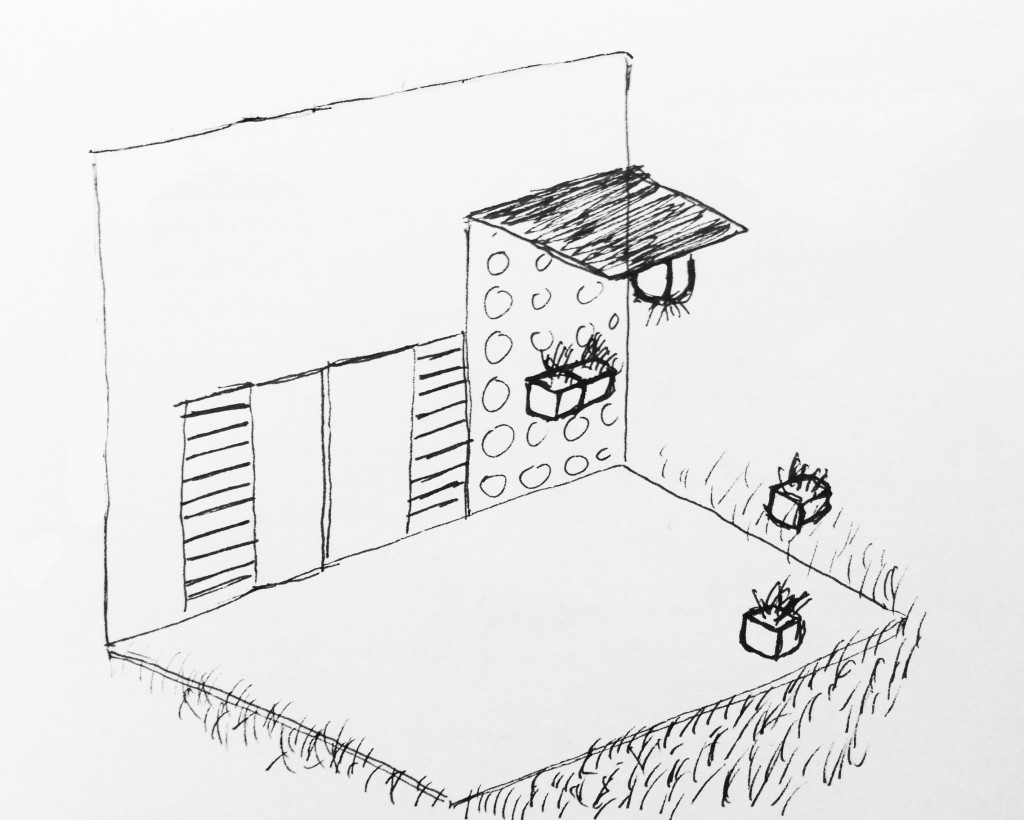
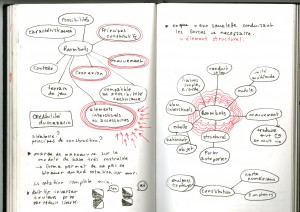
Il existe, à l’heure actuelle, des robots pour à peu près tout « Curiosity » pour l’exploration, les robots d’assemblage dans les usines, « Aibo » le chien orienté jeu/ loisir ou encore Roomba pour le domestique. Chaque robots, sont spécialisés dans un domaine particulier. Et si on croisait deux domaines ? L’exploration et le domestique par exemple. On peut imaginer des Roombots qui parcourraient la maison et le jardin, pour déplacer des plantes en fonction de leurs besoins. Le mouvement, presque organique, du roombot pourrait se coupler/ se fondre au déplacement des plantes. Un jour avoir un jardin à la française et le lendemain un jardin à l’anglaise pour être surpris, redécouvrir son jardin.
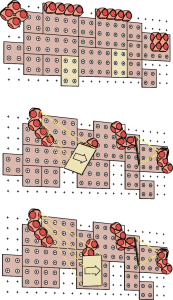
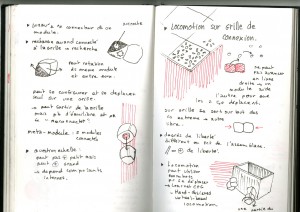
Les roombots se déplacent et s’assemble sur un grille pour former des mots ou des images en volumes. Ces volumes se construisent et se déconstruisent sous nos yeux a intervalles de temps régulier (ou non) ce qui utilise capacités de recombinaison, de mouvement et de déplacement des roombots. Une réserve de roombots non utilisés dans la construction se trouve dans un coin de la grille.
Comme les affiches défilent sur les panneaux publicitaires on pourrait faire défiler des constructions en roombots, par exemple. Peut etre aussi utilisé pour la scénographie, signalétique …
Les robots se déplacent sur une grille prédécoupé et détachable.
Lorsqu ils saisissent une partie de la grille, celle ci devient un écran qui peut bouger et s associer à d’autres écrans portées par des roombots.
Equipes d’un projecteur, ils sont parfois récepteur parfois émetteur d’informations, créant ainsi un système de signalétique reconfigurable.
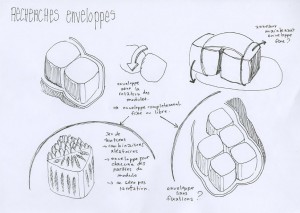
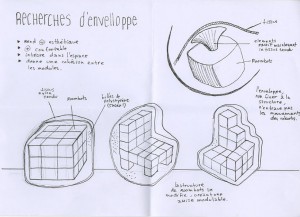
Les modules roombots ont un esthétique peu commun et risquent de dénoter dans notre environnement. Peut-on les recouvrir d’une enveloppe pour les rendre plus confortables et mieux les intégrer dans l’espace? Comment penser cette enveloppe afin qu’elle ne vienne pas entraver les mouvements des modules? Petites recherches sur l’habillage en parallèle de mon axe principal.
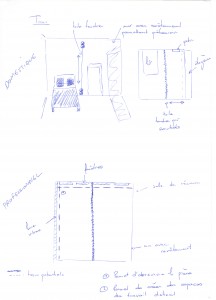
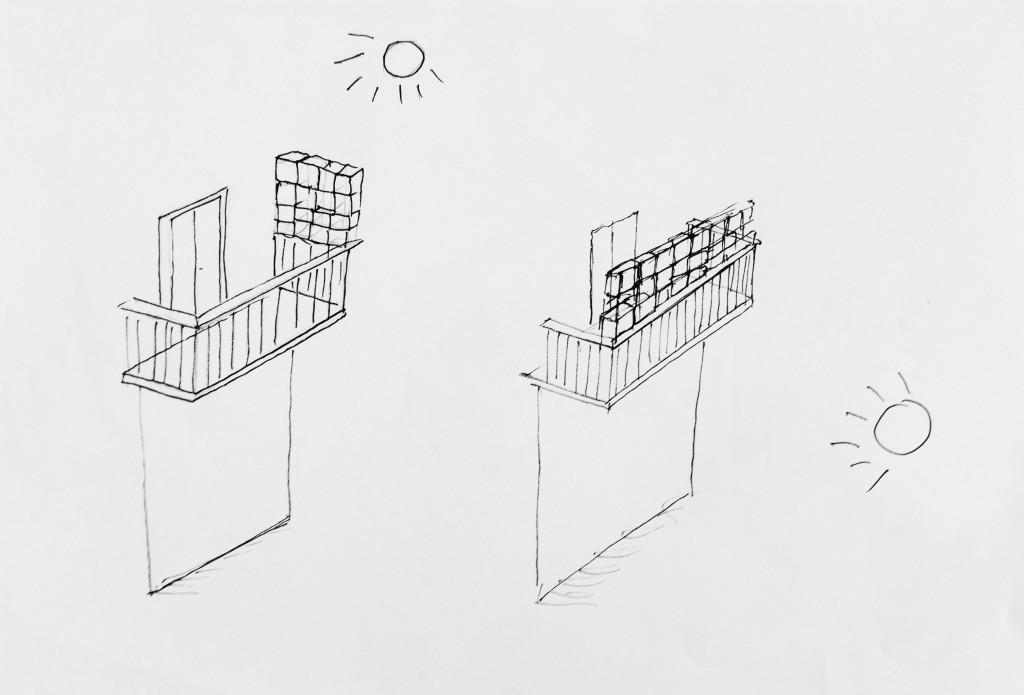
Ce magnifique schéma présente l’idée d’utiliser les roomboots comme éléments porteur de pièces de tissus. Il traite du thème de la modularité des différents espaces de vie.
Evoluant dans un intérieur conçu à cet effet (avec des parois sur lesquelles les roombots peuvent se mouvoir), les différents modules sont capable de se déplacer dans une pièce et d’y tendre un élément textile qui permettrait de structurer l’espace.
On peut par exemple imaginer cette mise en pratique dans une chambre : le tissus viendrait la tantôt cacher le lit et laisserait place à un dressing (le premier schéma présente ainsi, à droite de la porte des rangements), tantôt servir de cache-armoire.
Dans un contexte professionnel (schéma 2), on pourrait imaginer les roombots venir tendre un tissus devant des fenêtres ou une baie vitrée pour obscurcir la salle lors d’une projection, ou bien diviser l’espace si besoin.
L’avantage serait finalement une modularité infinie puisqu’il est possible de faire évoluer les plan dans toutes les dimensions, sur des axes horizontaux et verticaux. On pourra ainsi imaginer ce système d’un côté décoratif, par exemple avec un tissus peint, des jeux de lumières et la variation des plans.
Il s’agit ici de micro-architectures modulables que l’on pourrait retrouver dans des chambres d’enfants à la façon des tentes d’intérieur. Parfois igloo, parfois tipi d’indiens, les roombots formeraient des structures changeantes où les enfants aimeraient jouer et se cacher.
Leur modularité serait à la base de leur structure puisqu’elle permettrait, entre autre, de tendre les tissus et de les ré-assembler pour former des portes ou des murs ainsi qu’une source d’inspiration et une stimulation des imaginaires d’enfants.
Pour des questions de format d’images, je me permets de retranscrire mes commentaires de façon claire à côté de celles-ci.
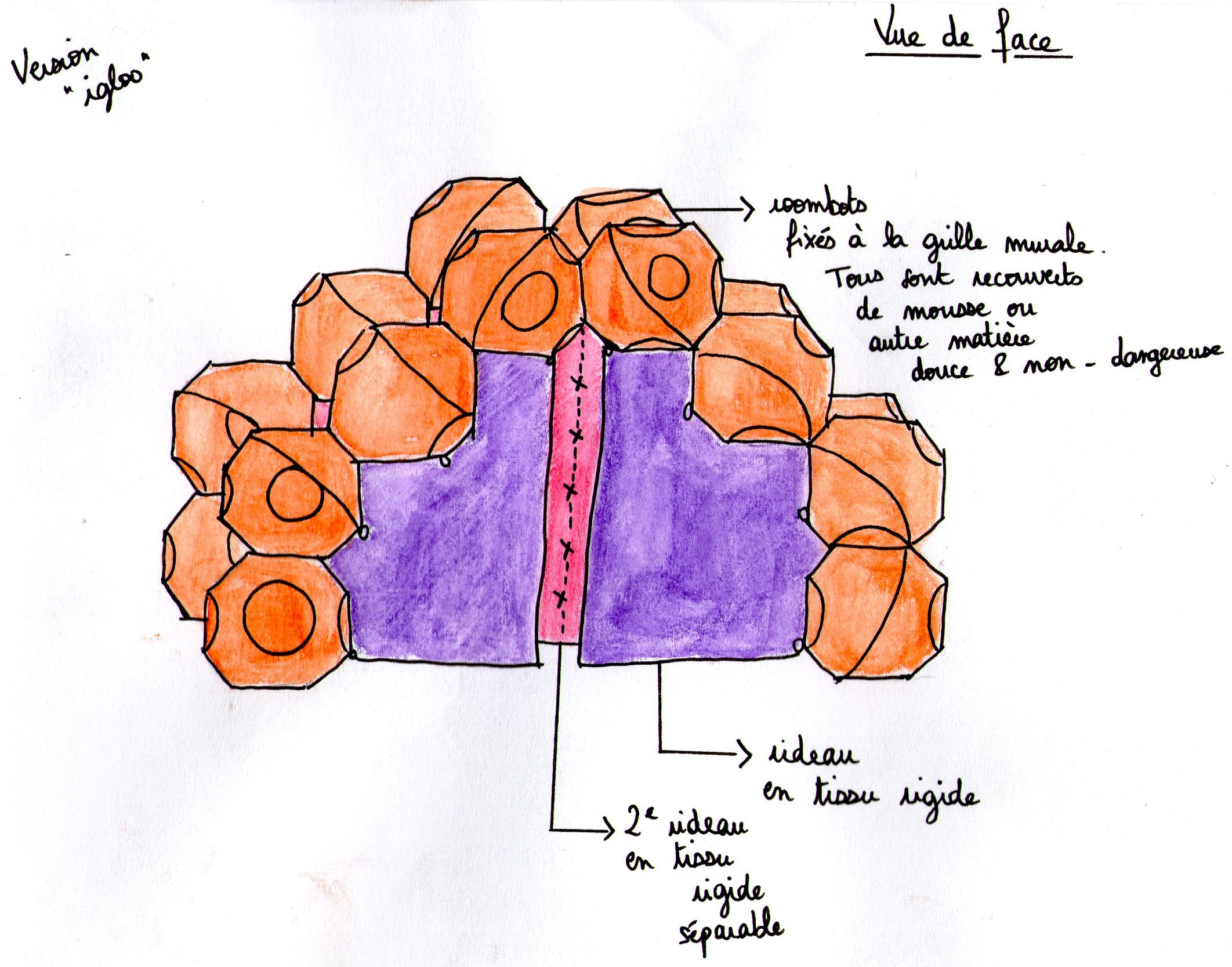
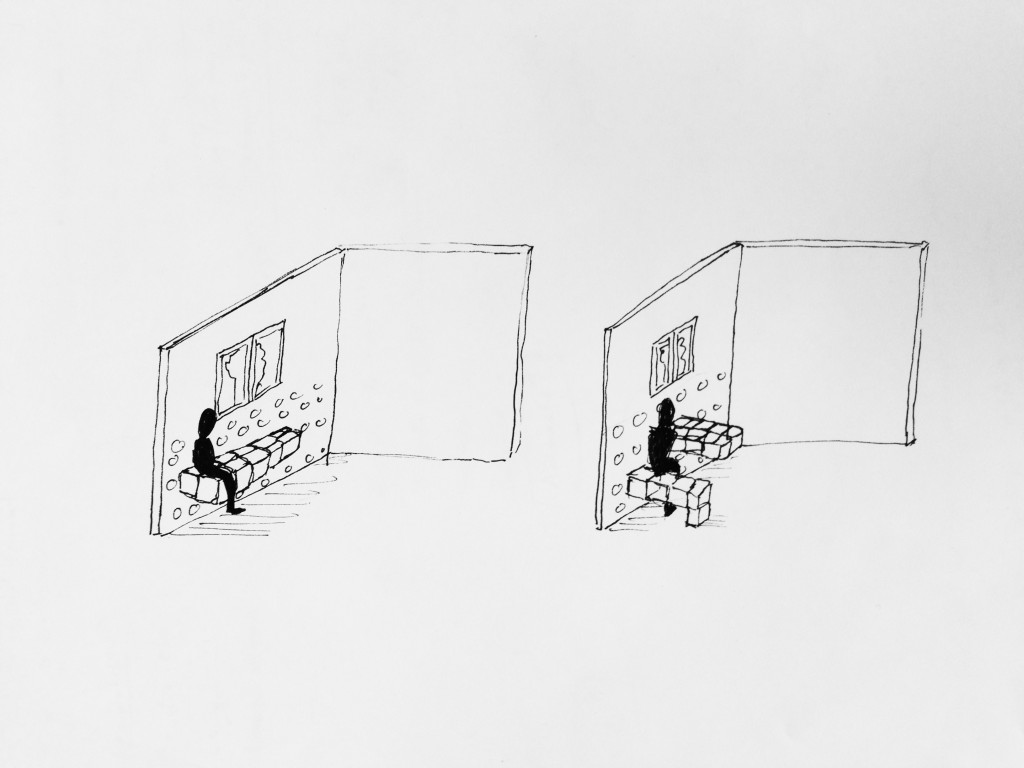
Les roombots sont fixés à une grille murale et recouverts de mousse ou toute autre matière douce et non-dangereuse. Les deux rideaux sont en tissu rigide ; le premier est séparé, le second est séparable.
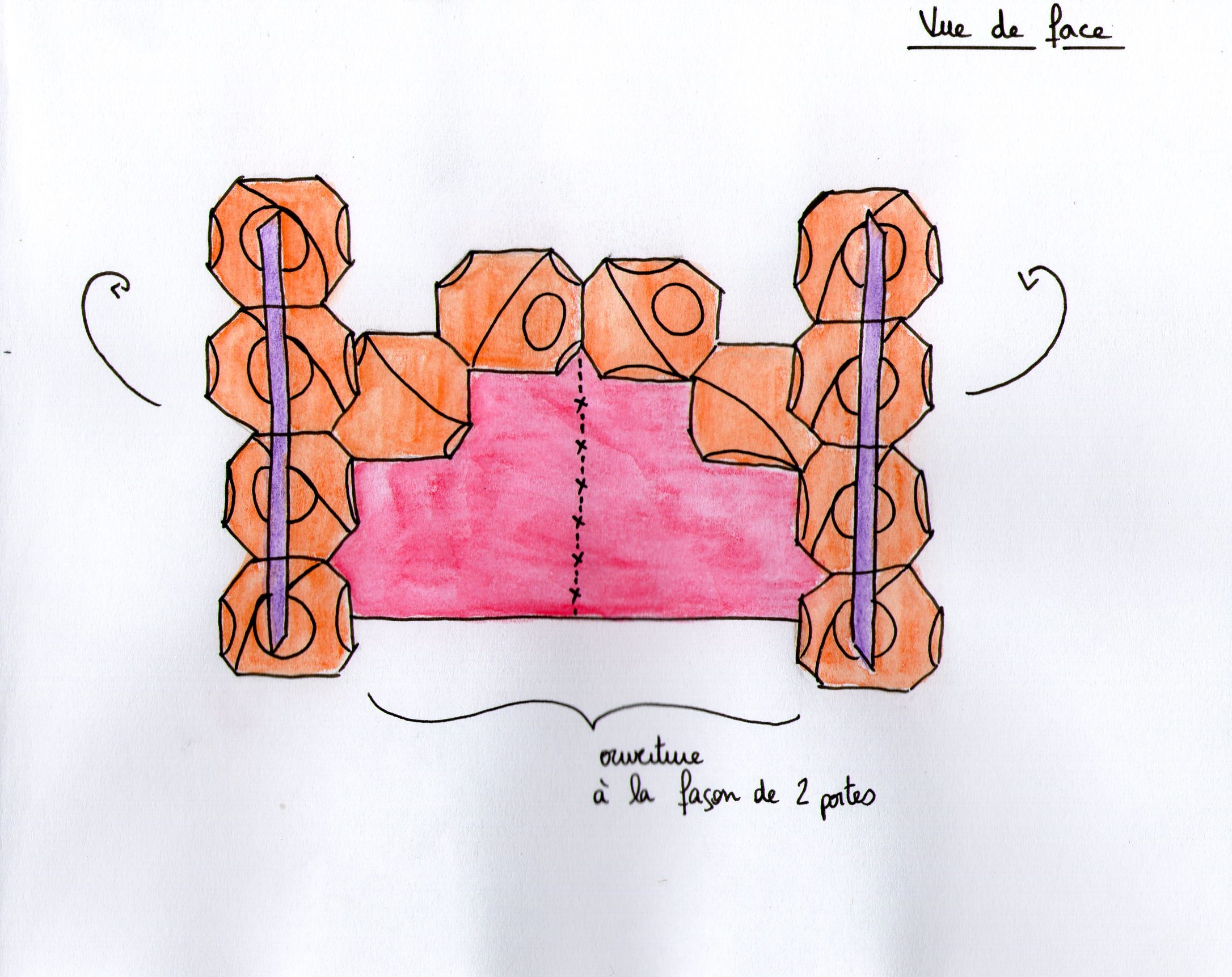
Ouverture à la façon de deux portes.
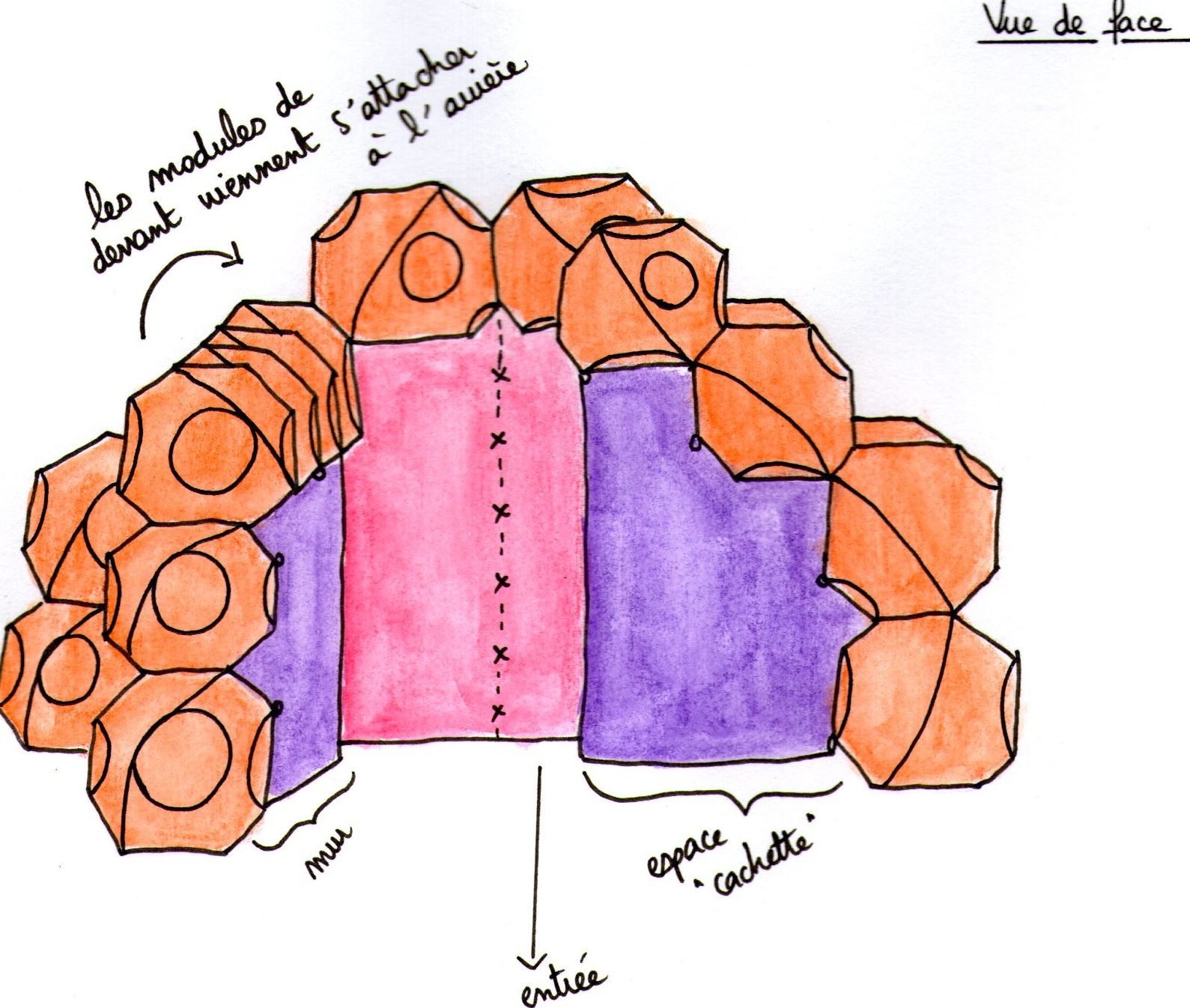
Les modules de devant viennent s’attacher à l’arrière, créant ainsi un mur, une entrée et un espace « cachette ».
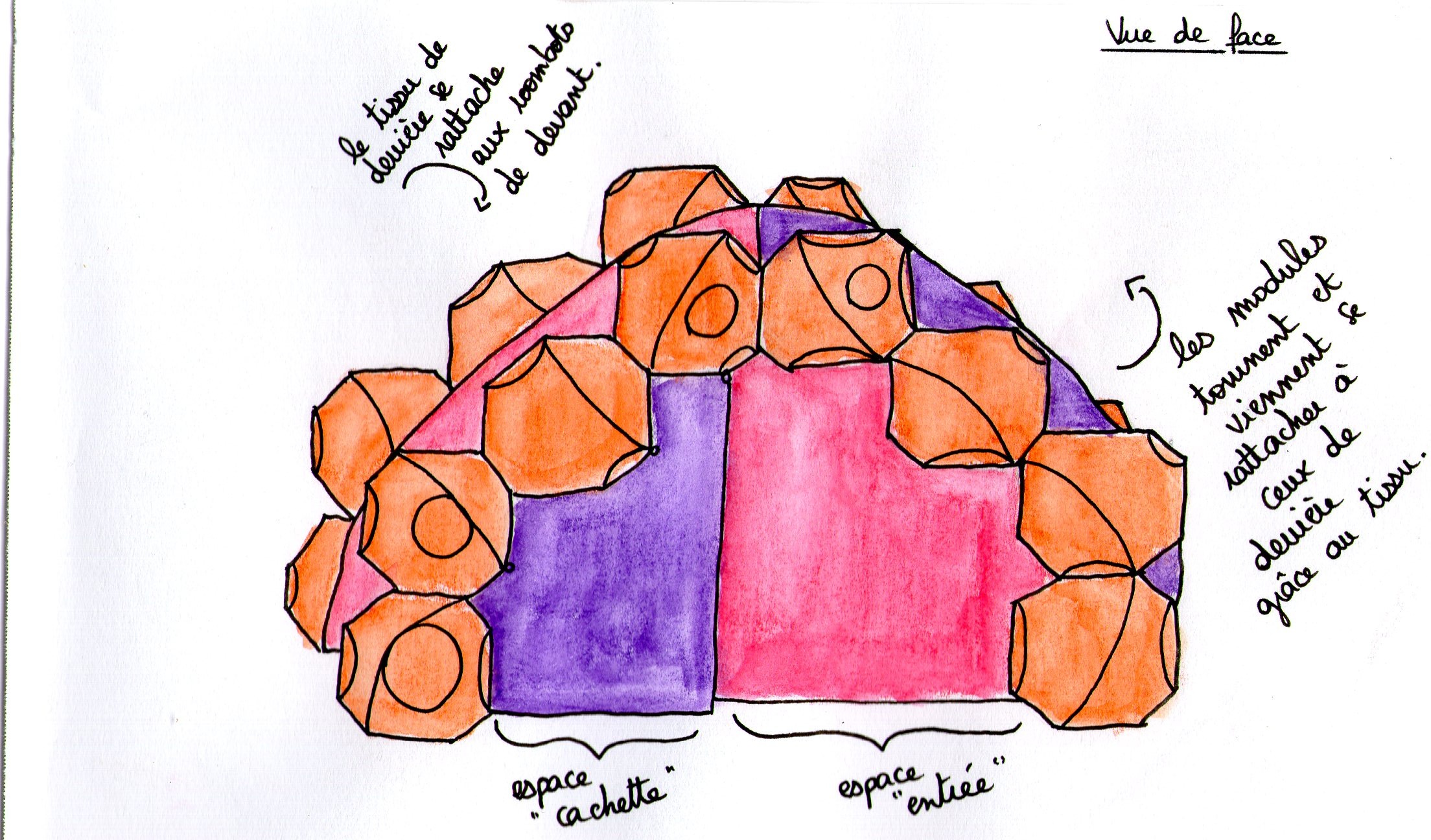
Le tissu séparable de l’arrière vient s’attacher aux roombots de devant, le tissu »porte » de devant vient s’attacher à l’arrière créant ainsi une seconde façon d’imaginer un espace « entrée » et un espace « cachette ».
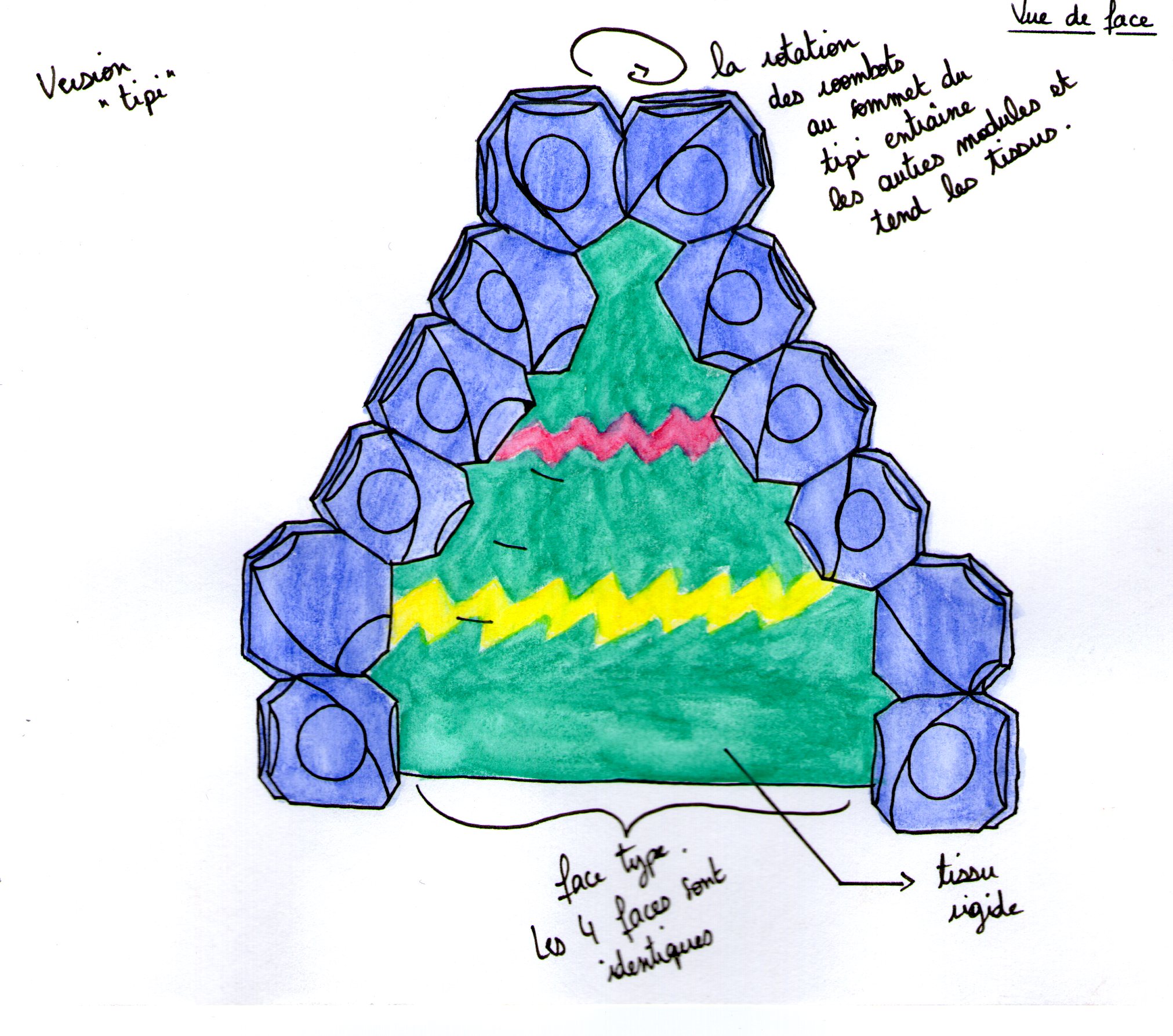
La rotation des roombots du dessus entraîne celle des autres et cette réaction en chaîne tend les tissus des quatre faces du tipi.
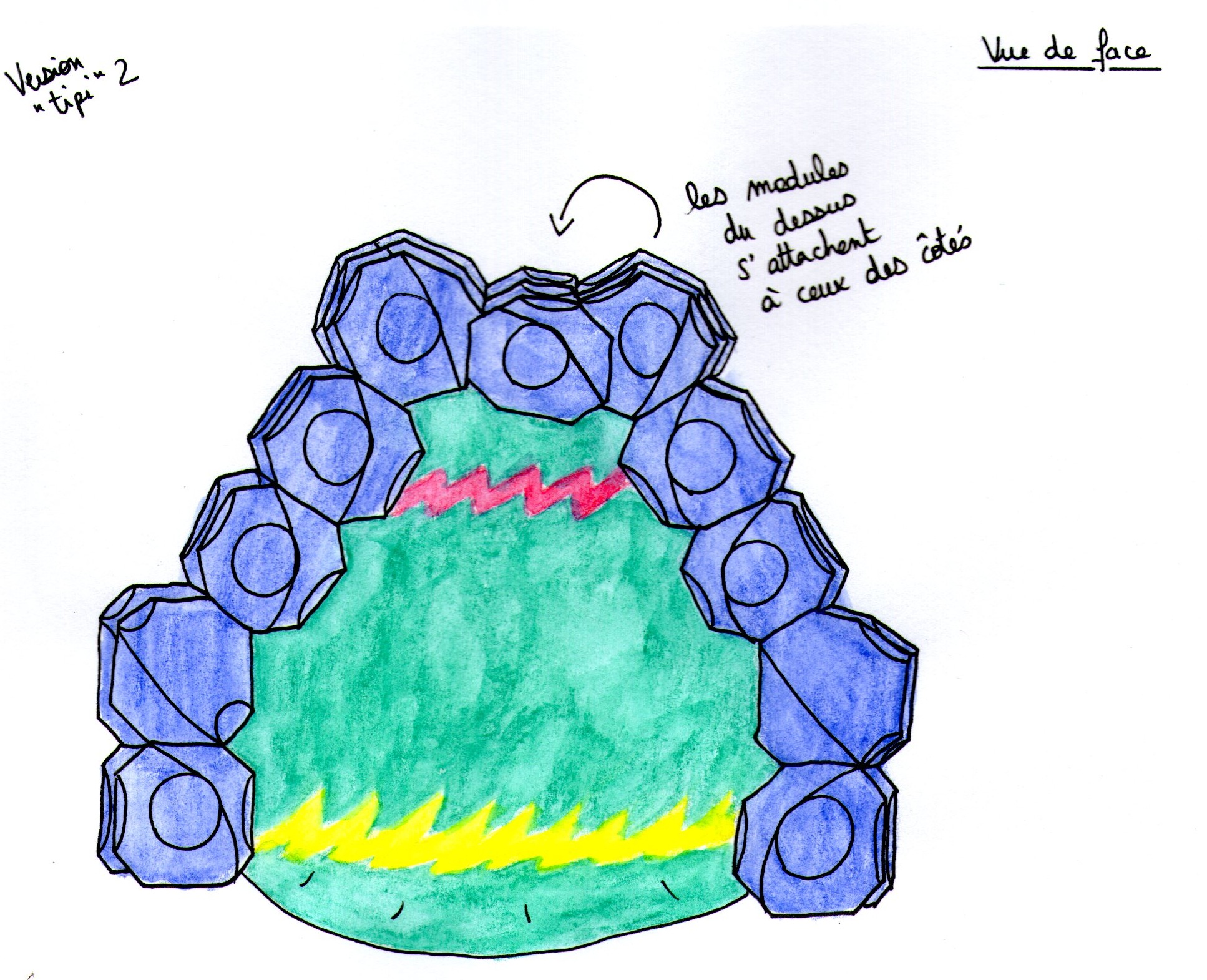
L’abaissement et le rattachement des roombots au sommet du tipi crée une ouverture au niveau du toit, le tipi rapetisse et gagne en largeur.
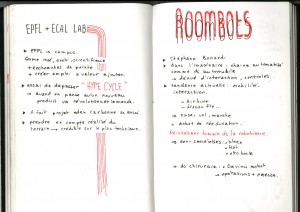
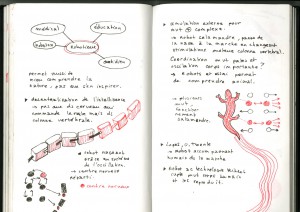
A la demande de quelques personnes, je poste mes notes qui retracent les différents points abordés sur la technologie roombots et la robotique lors de notre séjour a l’EPFL.
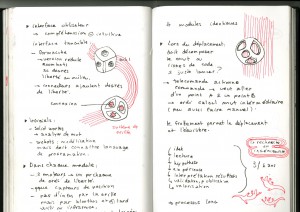
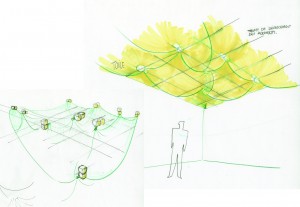
Vue de dessus et vue de dessous. La grille de déplacement se situe au dessus de la toile tendue.
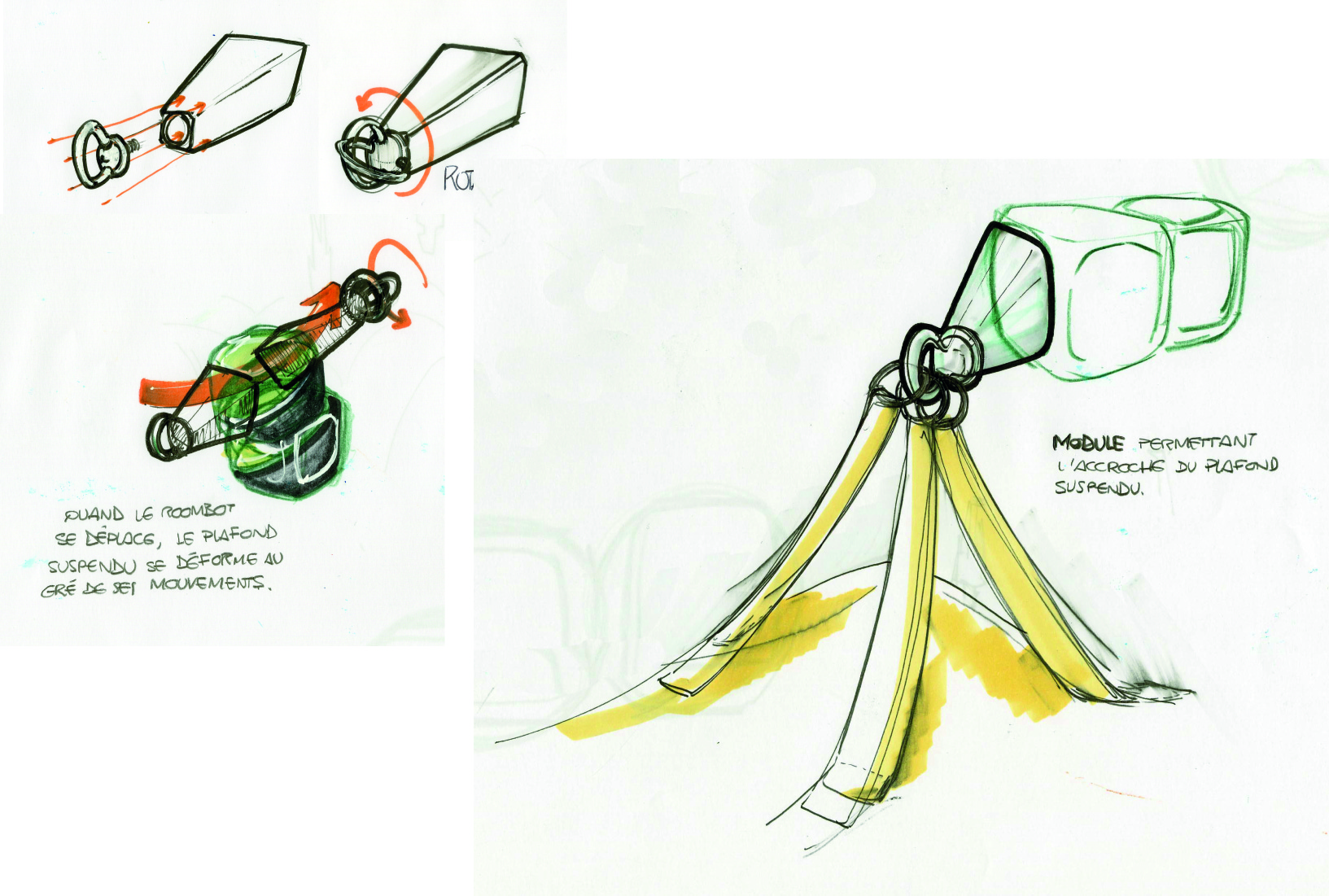
Module de fixation de la toile sur les roombots. La boucle est articulée sur 360° pour laisser les sangles toile-robots toujours tombantes.
Le Roombots par son mouvement et sa modularité pourrait participer à rendre les espaces plastiques, mouvants. Ici un exemple de plafond (qui nécessiterais que les robots puissent être plus à l’aise sur les plafond qu’à l’heure actuelle).