

ManuAdManum
Svea Hillenbrand – Hugues Couverchel
Projet réalisé en partenariat avec Microsoft
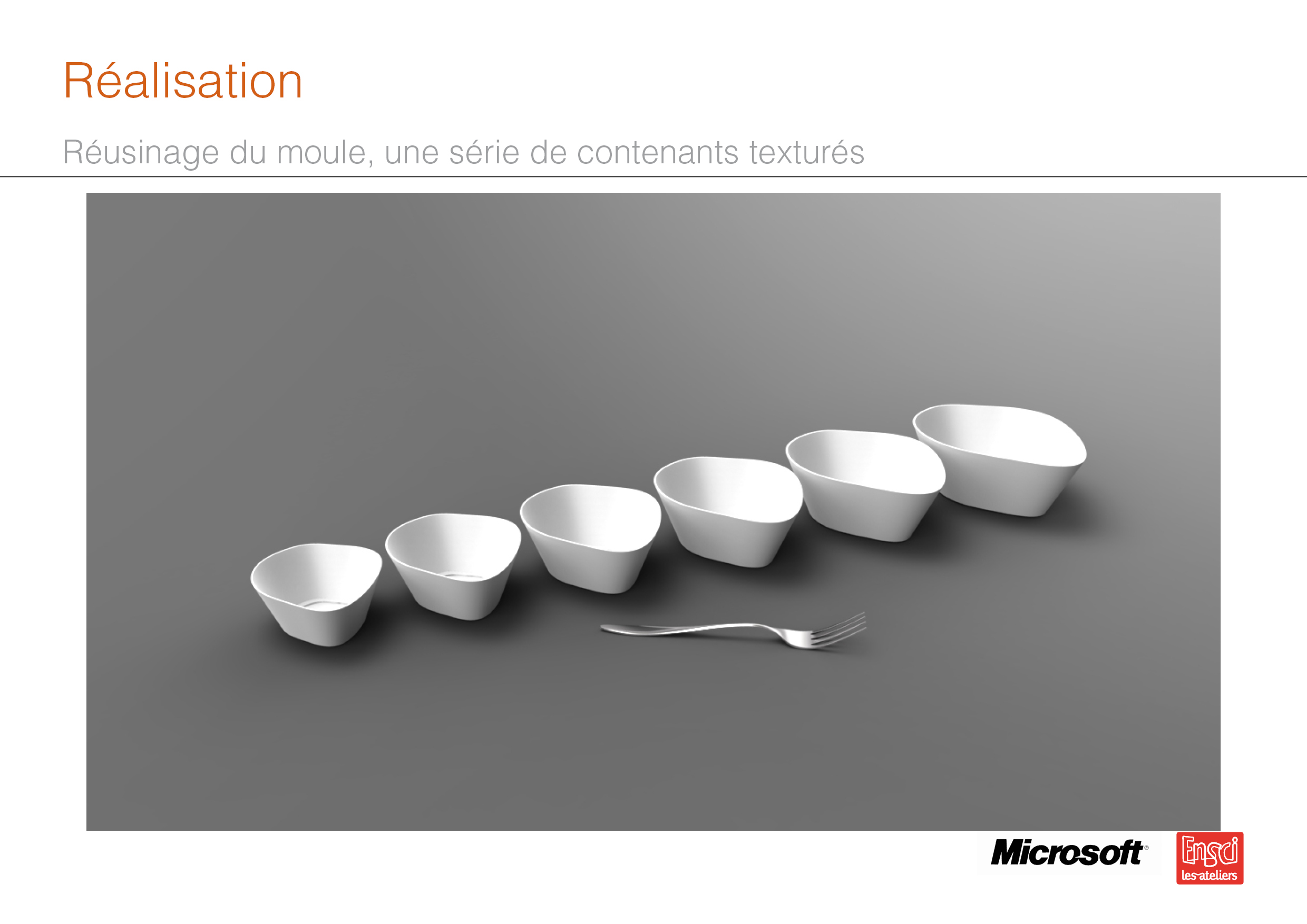
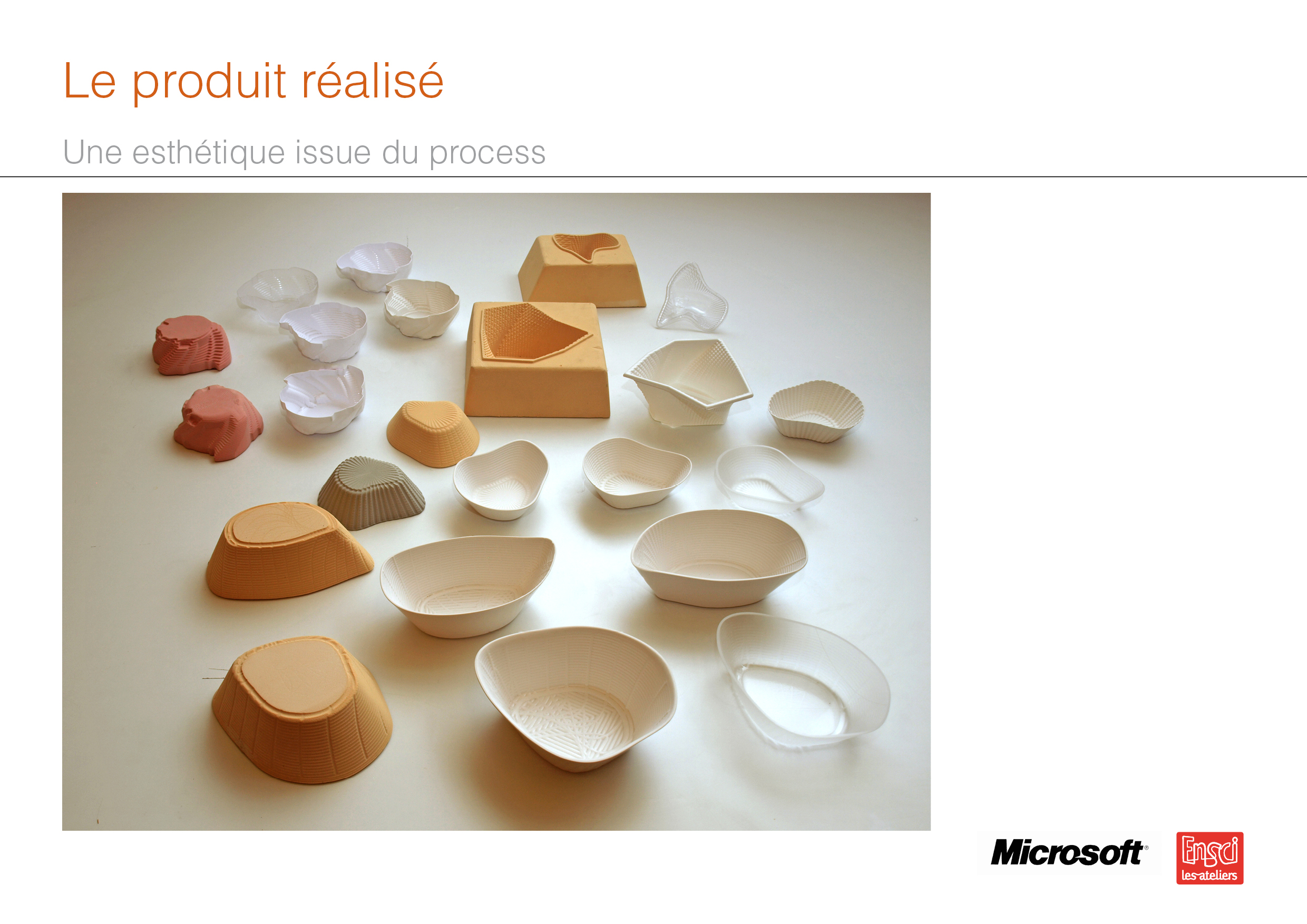
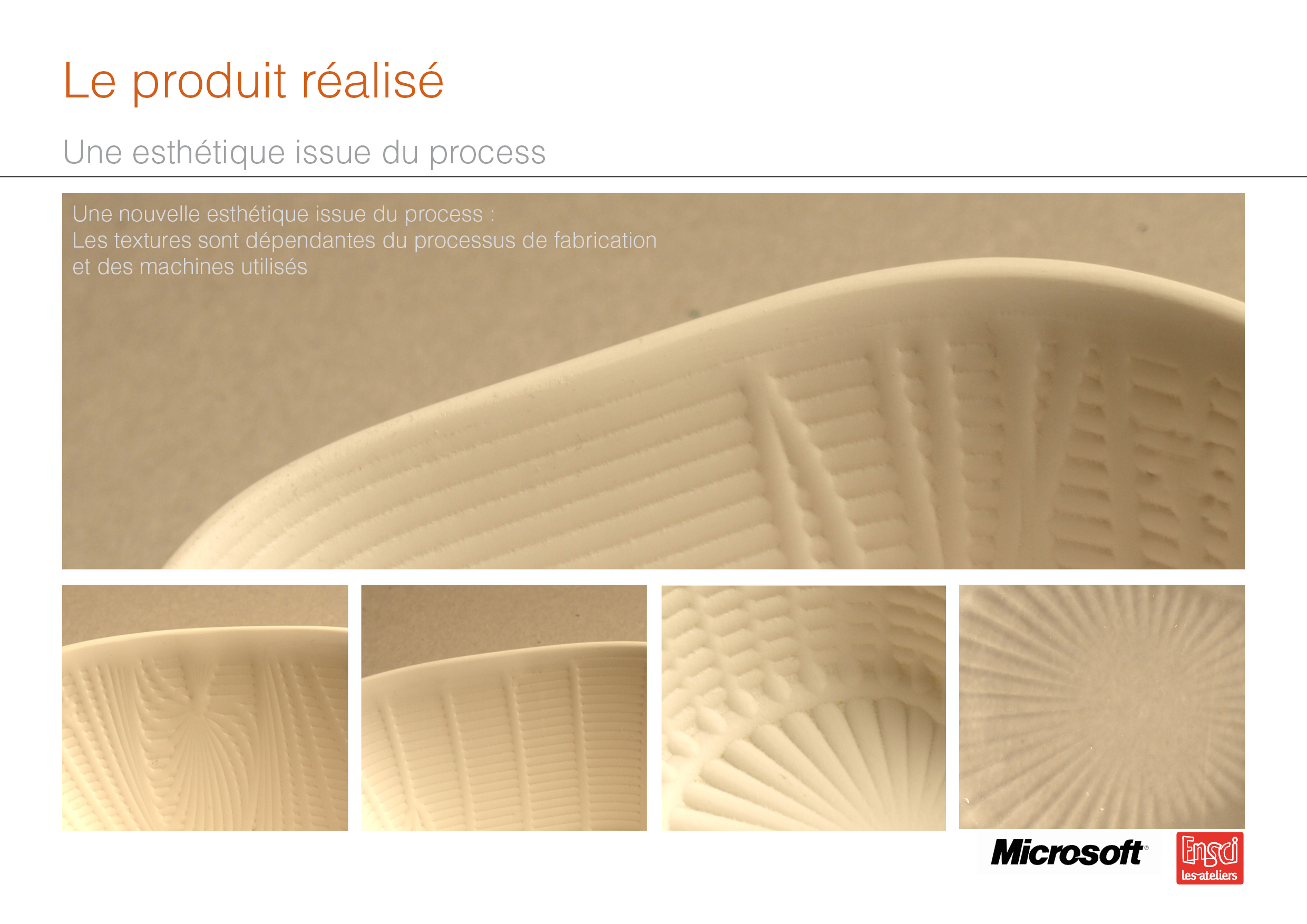
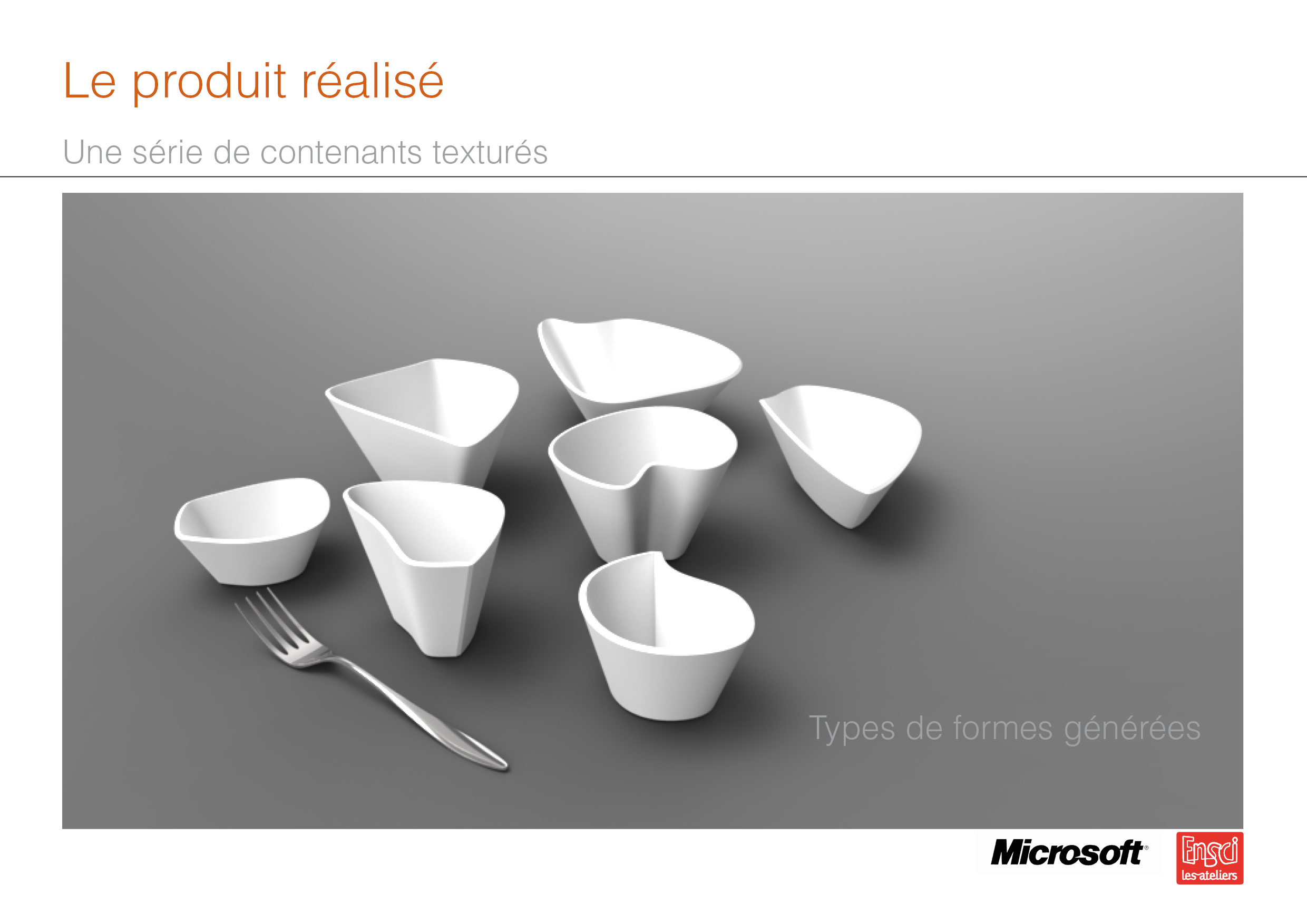
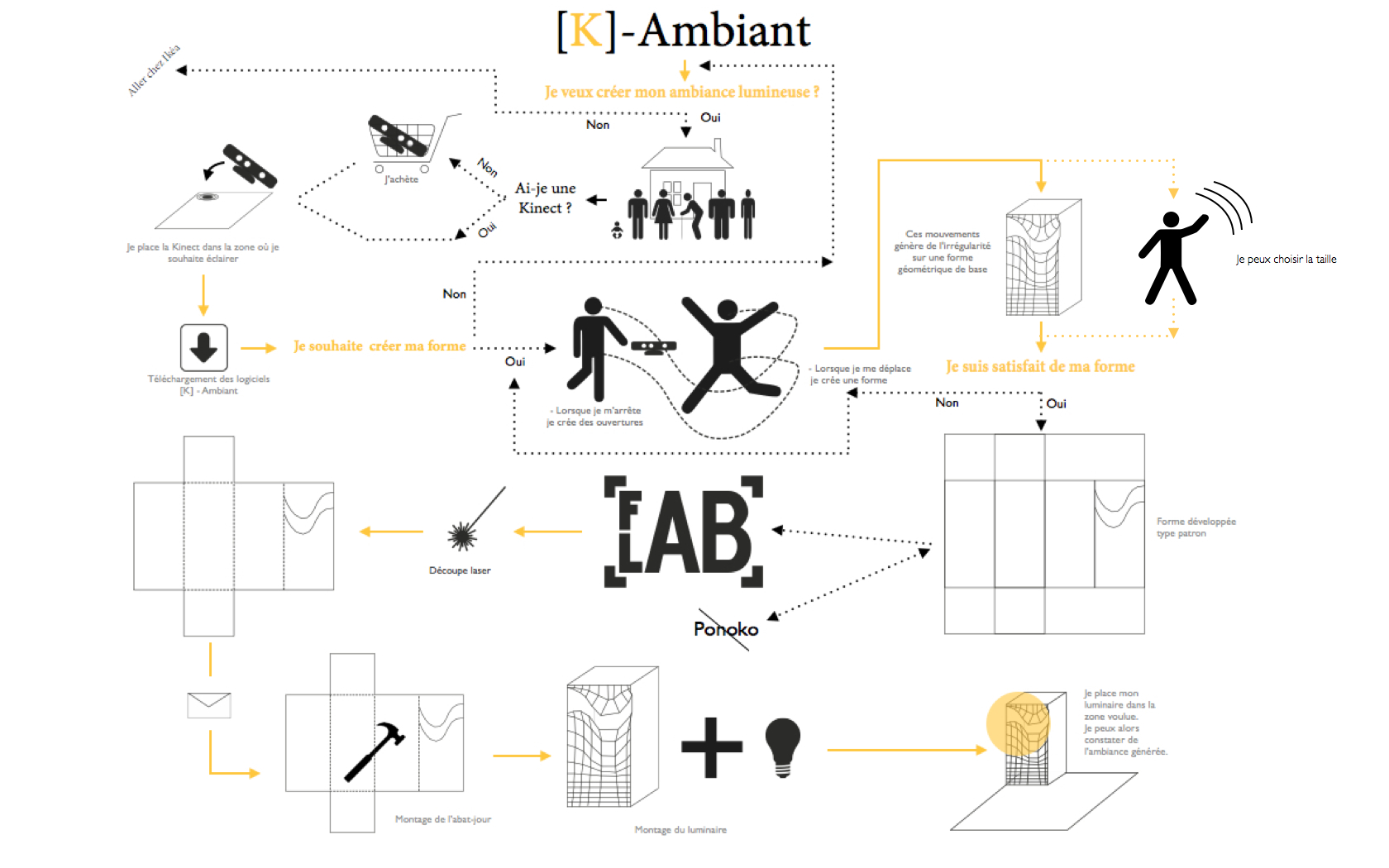
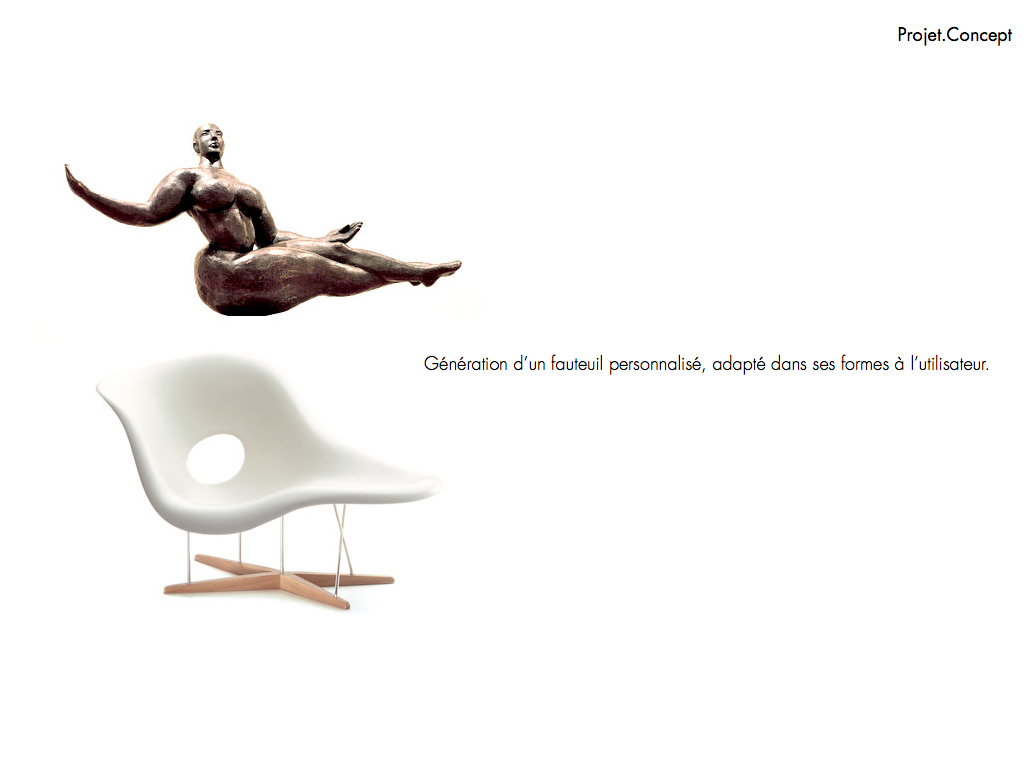
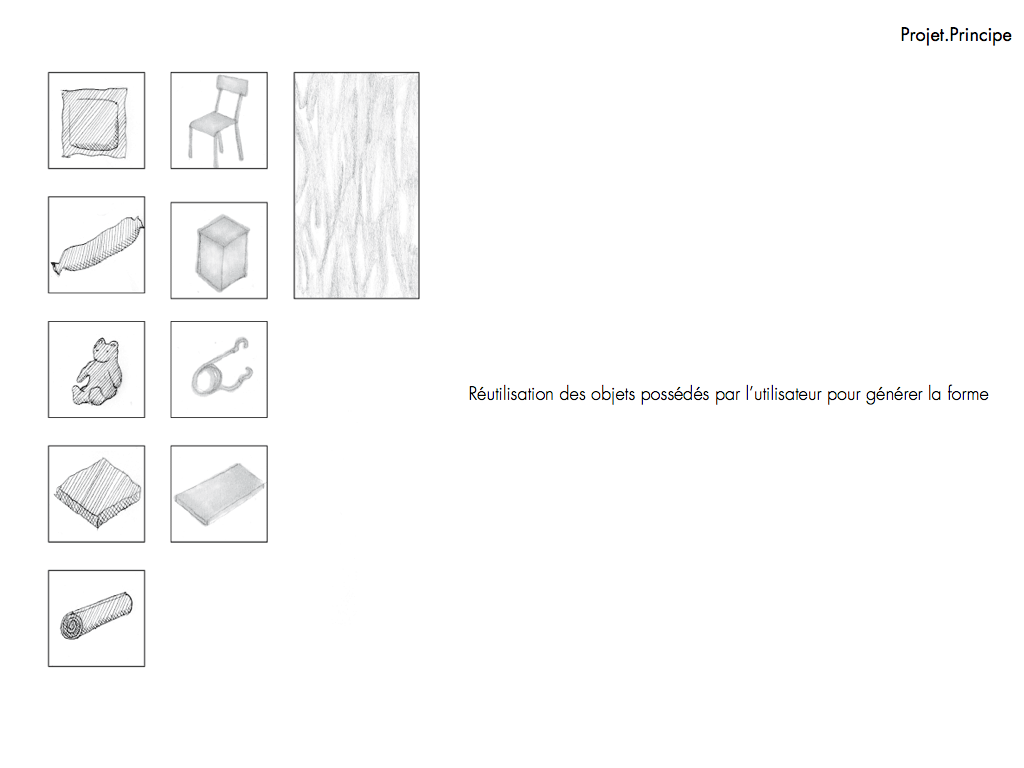
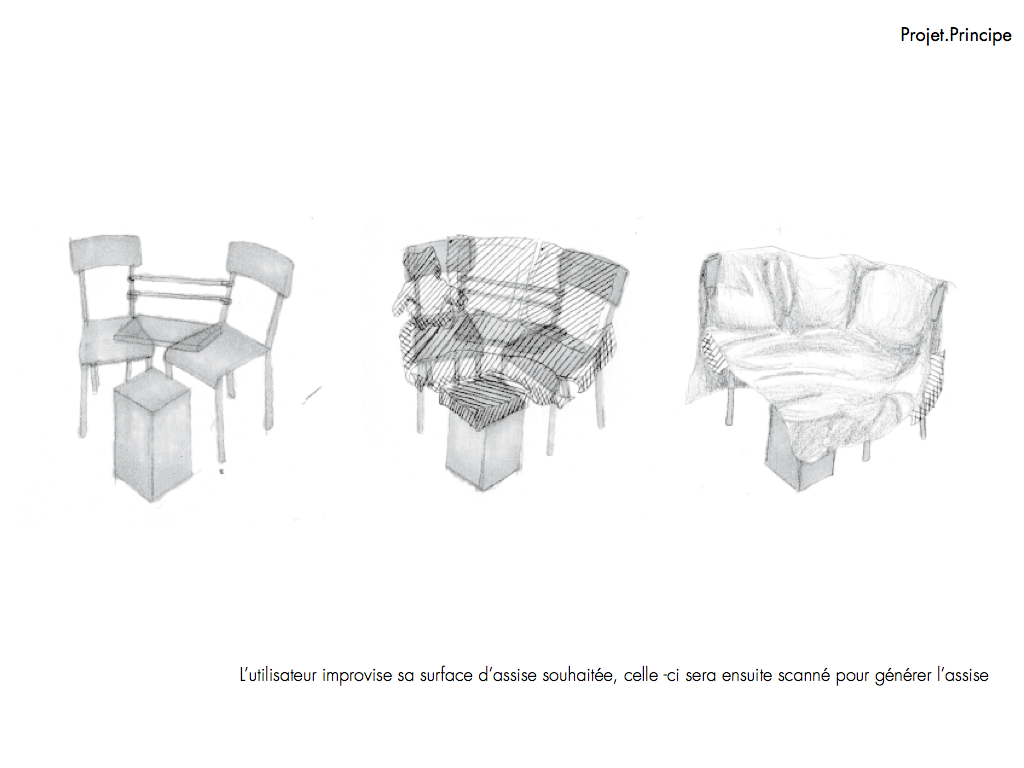
Pour ce projet, nous avons eu à coeur de réintroduire sur le matériau plastique une diversité de textures. Le dispositif offre la possibilité de mettre en forme des contenants alimentaires (bols, coupes, assiettes…) en fonction des besoins de chacun.
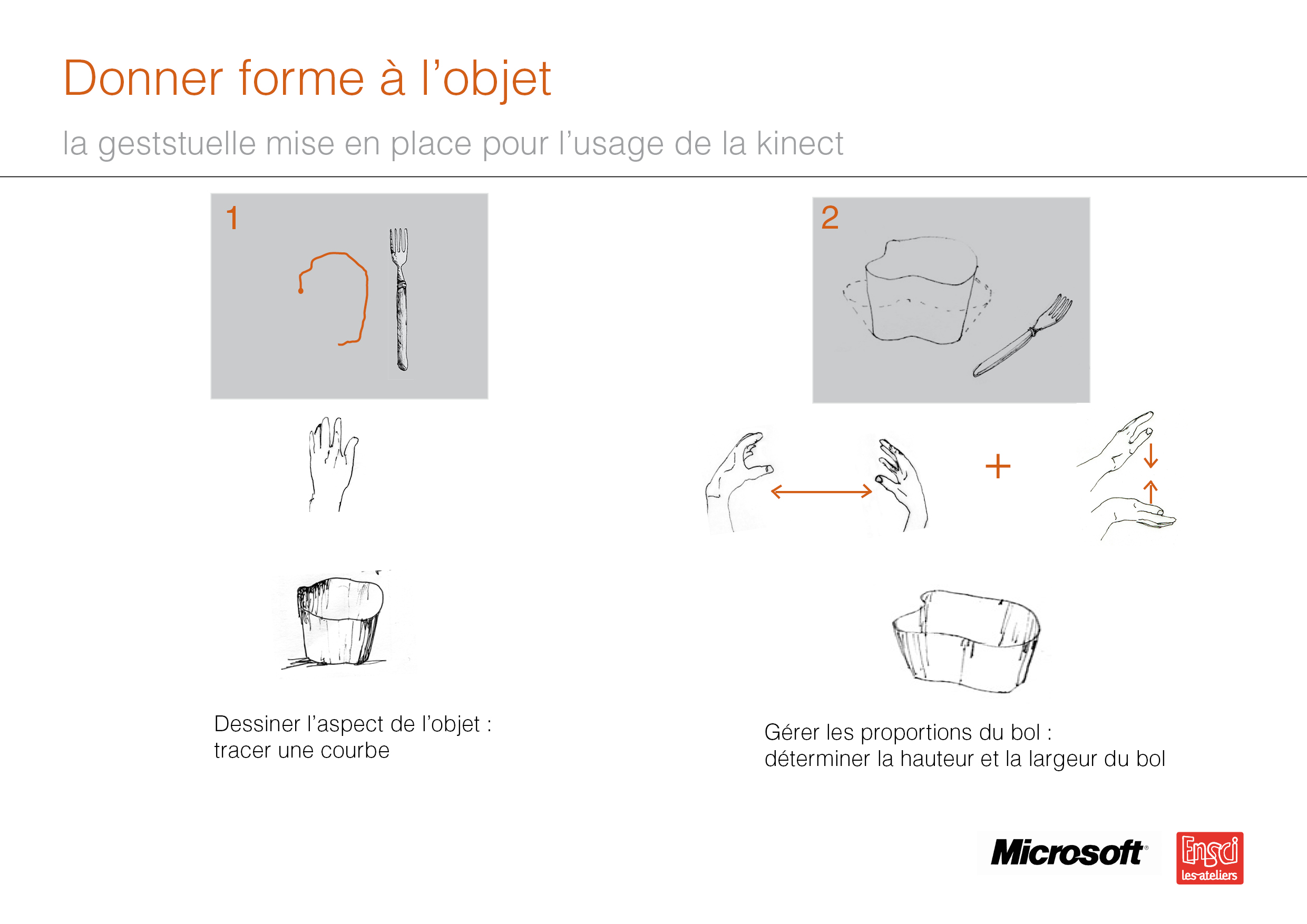
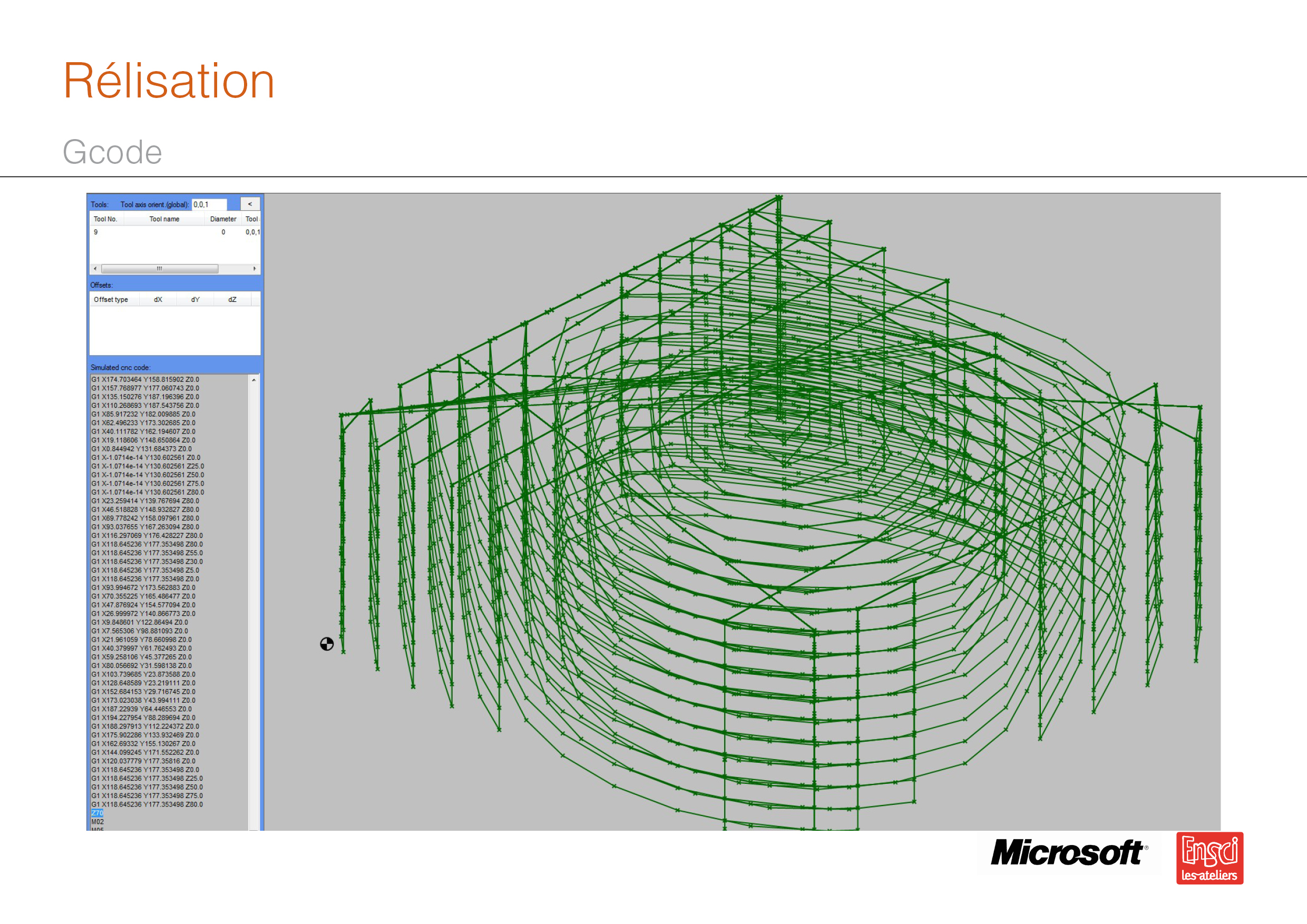
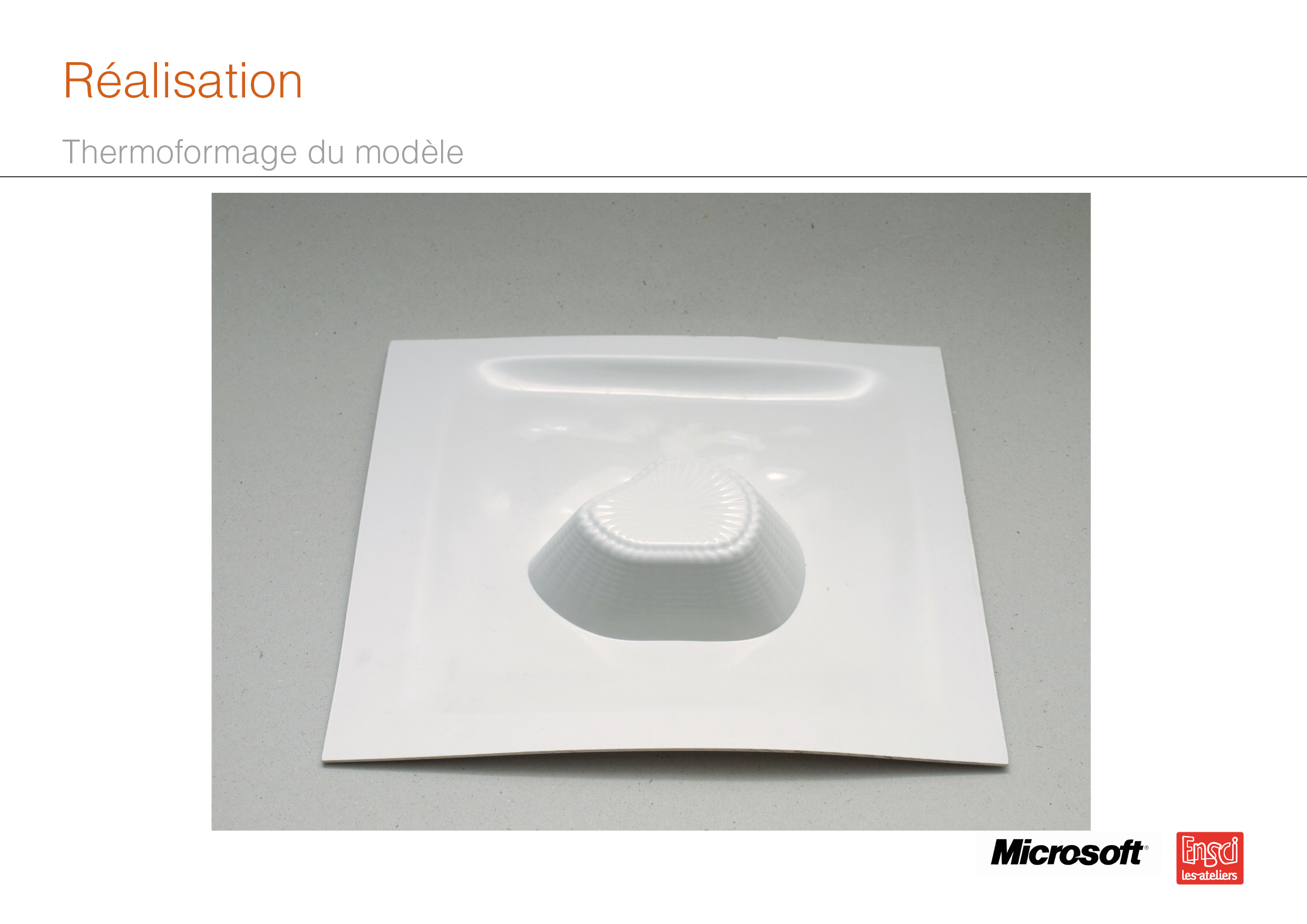
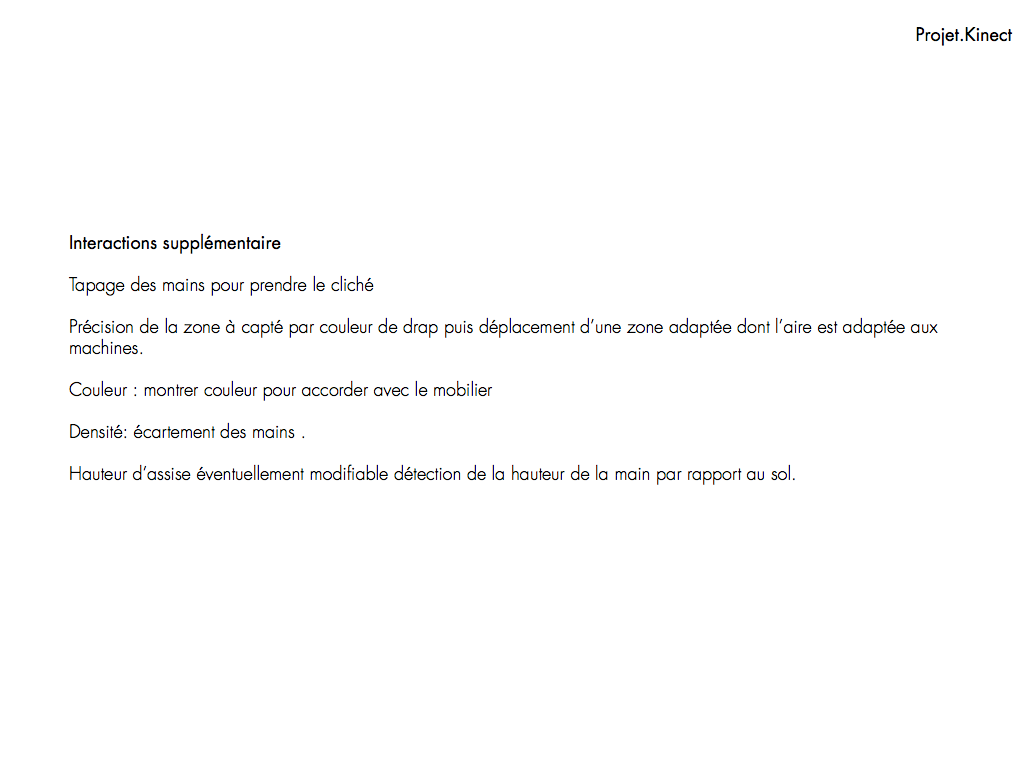
A l’aide des gestes captés par Kinect, il s’agit de definir le volume puis de dessiner la texture du contenant. Il est enfin réalisé par l’utilisateur dans un fablab.La chaine de conception et de réalisation mise en place permet la creation de pièces singulières et questionne l’appropriation de techniques artisanales au sein du fablab
A l’aide des gestes captés par Kinect, il s’agit de definir le volume puis de dessiner la texture du contenant. Il est enfin réalisé par l’utilisateur dans un fablab.La chaine de conception et de réalisation mise en place permet la creation de pièces singulières et questionne l’appropriation de techniques artisanales au sein du fablab






































{kind=link}