

Vues éclatées du scanner sans
ses composants électriques.


 La réalisation de ce scanner comporte un certain niveau de complexité.Pour quelqu’un qui de l’expérience dans le domaine du bois, la totalité des usinages peut s’effectuer avec de l’outillage électroportatif, toutefois il est préférable de réaliser les pièces comportant des courbes sur une machine à commande numérique.
La réalisation de ce scanner comporte un certain niveau de complexité.Pour quelqu’un qui de l’expérience dans le domaine du bois, la totalité des usinages peut s’effectuer avec de l’outillage électroportatif, toutefois il est préférable de réaliser les pièces comportant des courbes sur une machine à commande numérique.
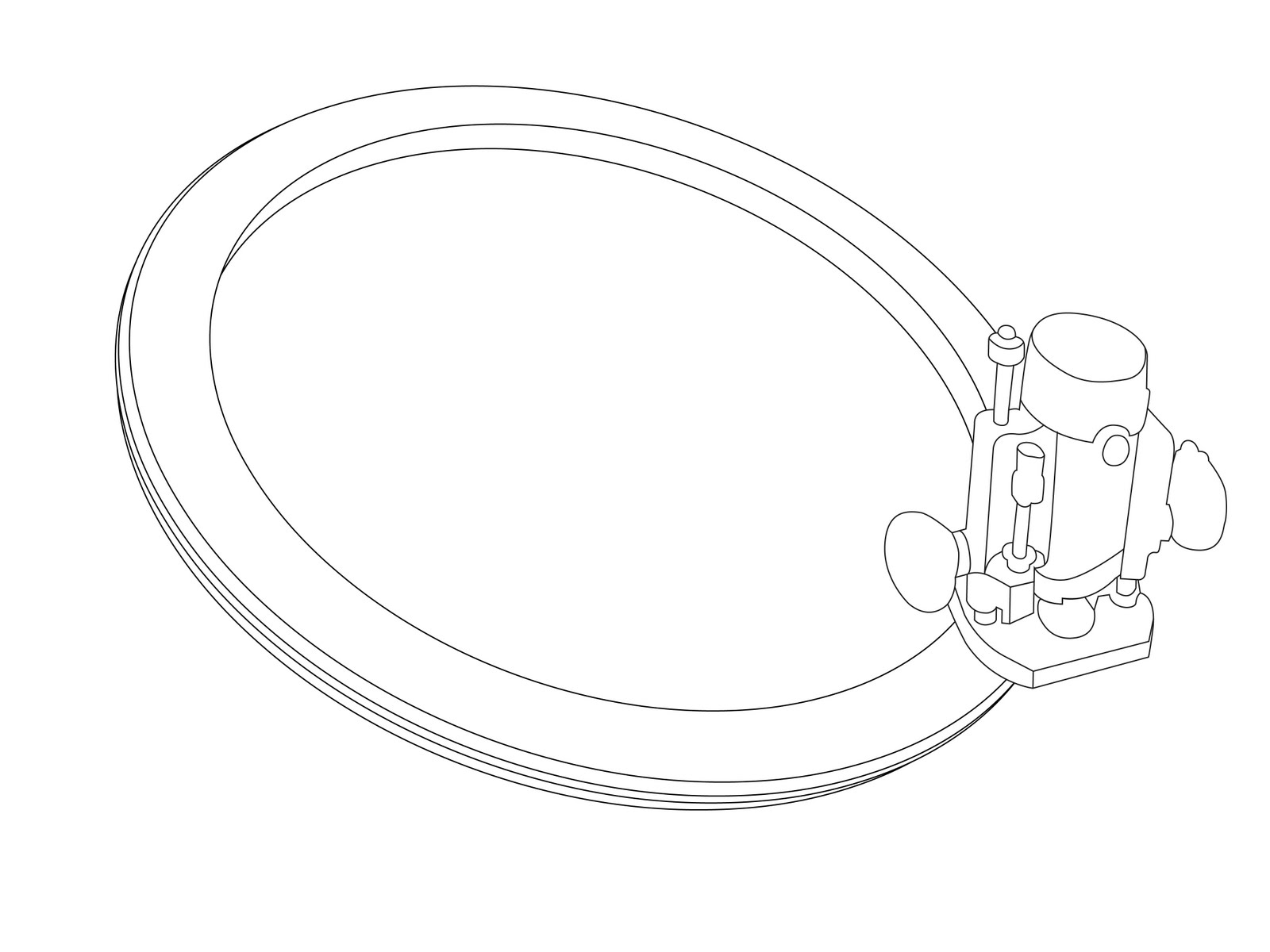
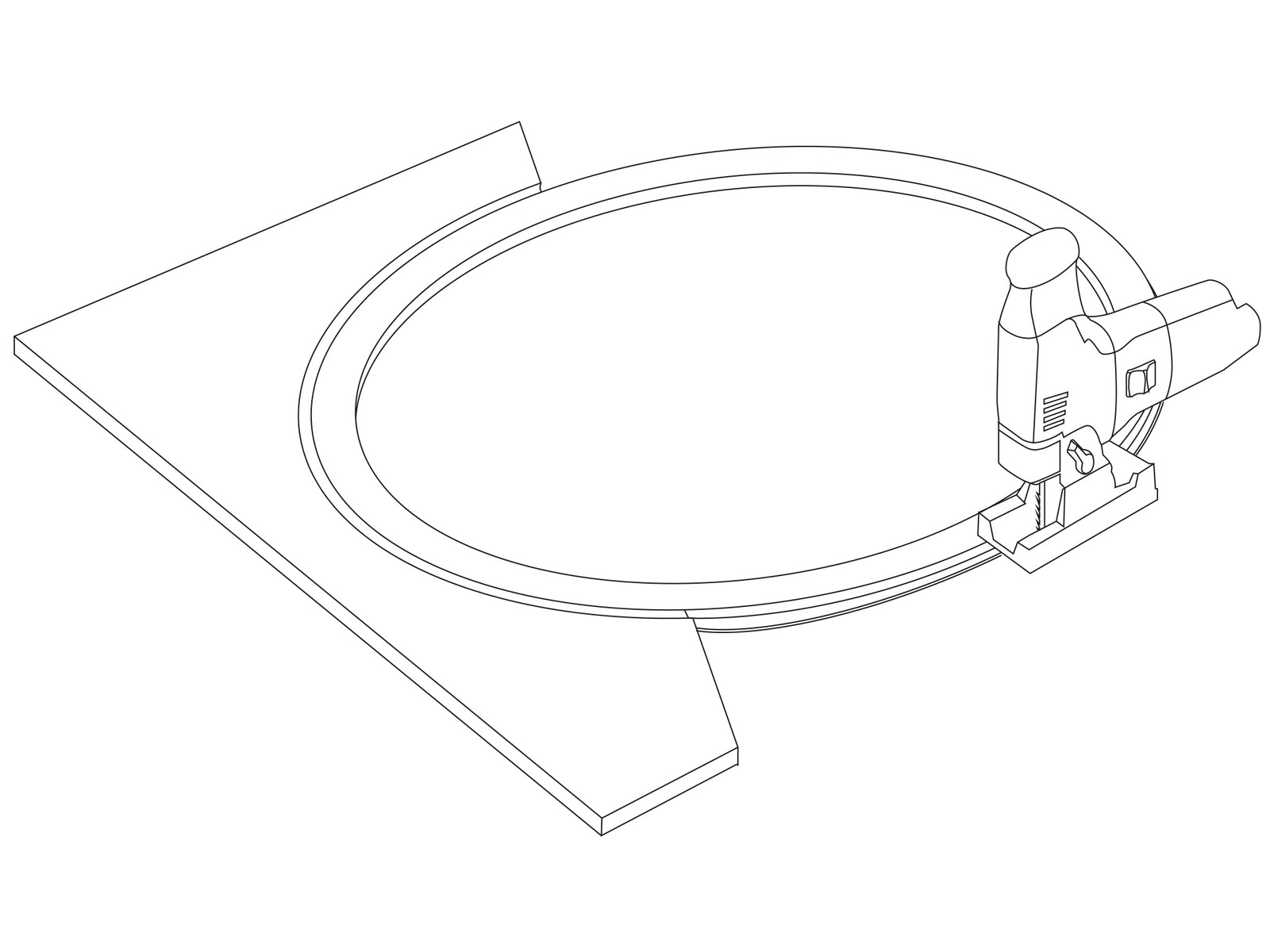
4) Ensuite, réaliser les deux feuillures sur la couronne et également sur la partie inférieur au plateau qui servira d’engrenage. Pour cela nous avons le choix entre changer le roulement à bille en bout de la fraise ou mettre un guide indépendant à la fraise. Peut importe la méthode employé, il faut obtenir une feuillure de 3 x 3 mm de chaque côté sur les parties extérieurs des cintrées.
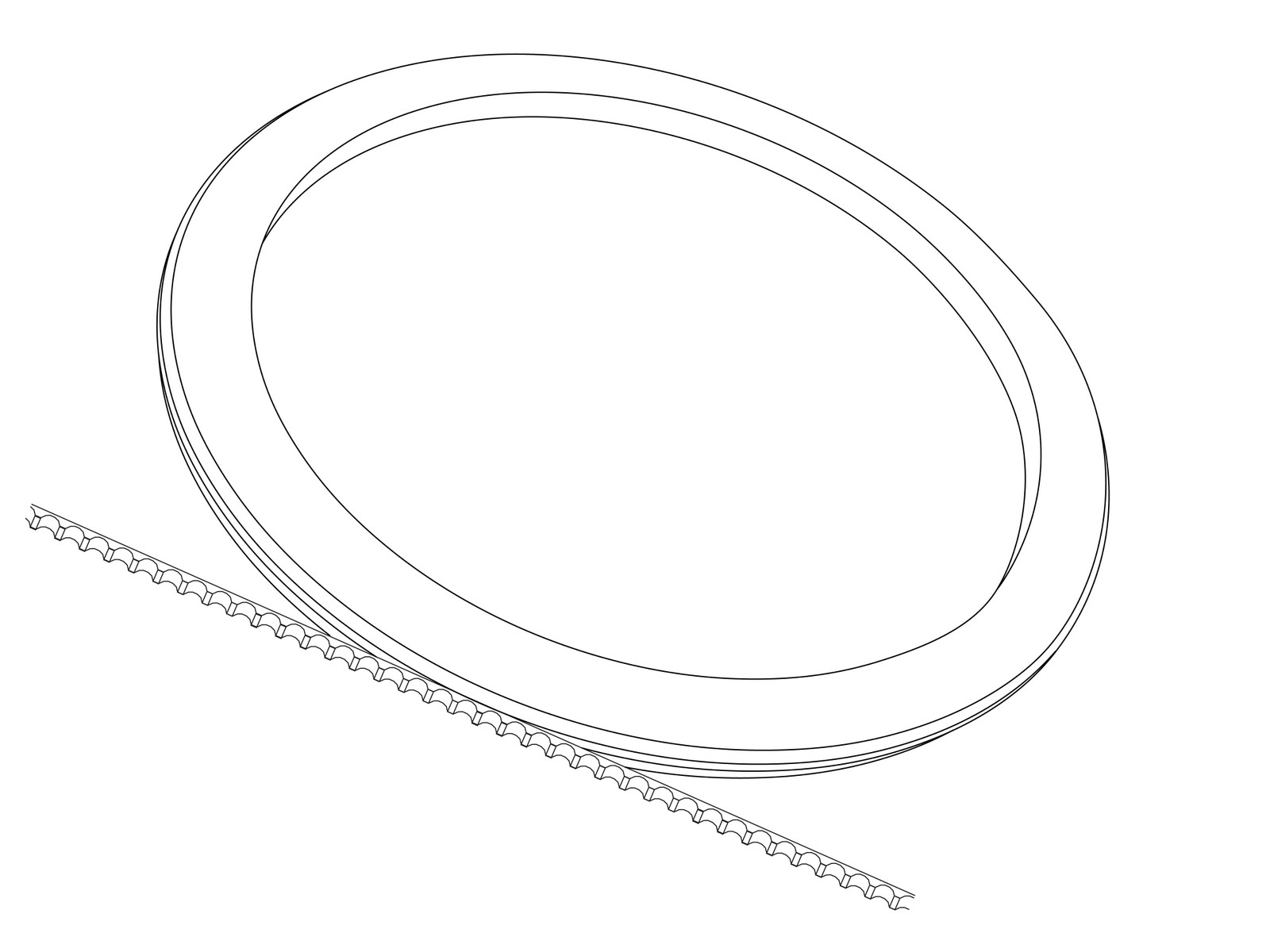
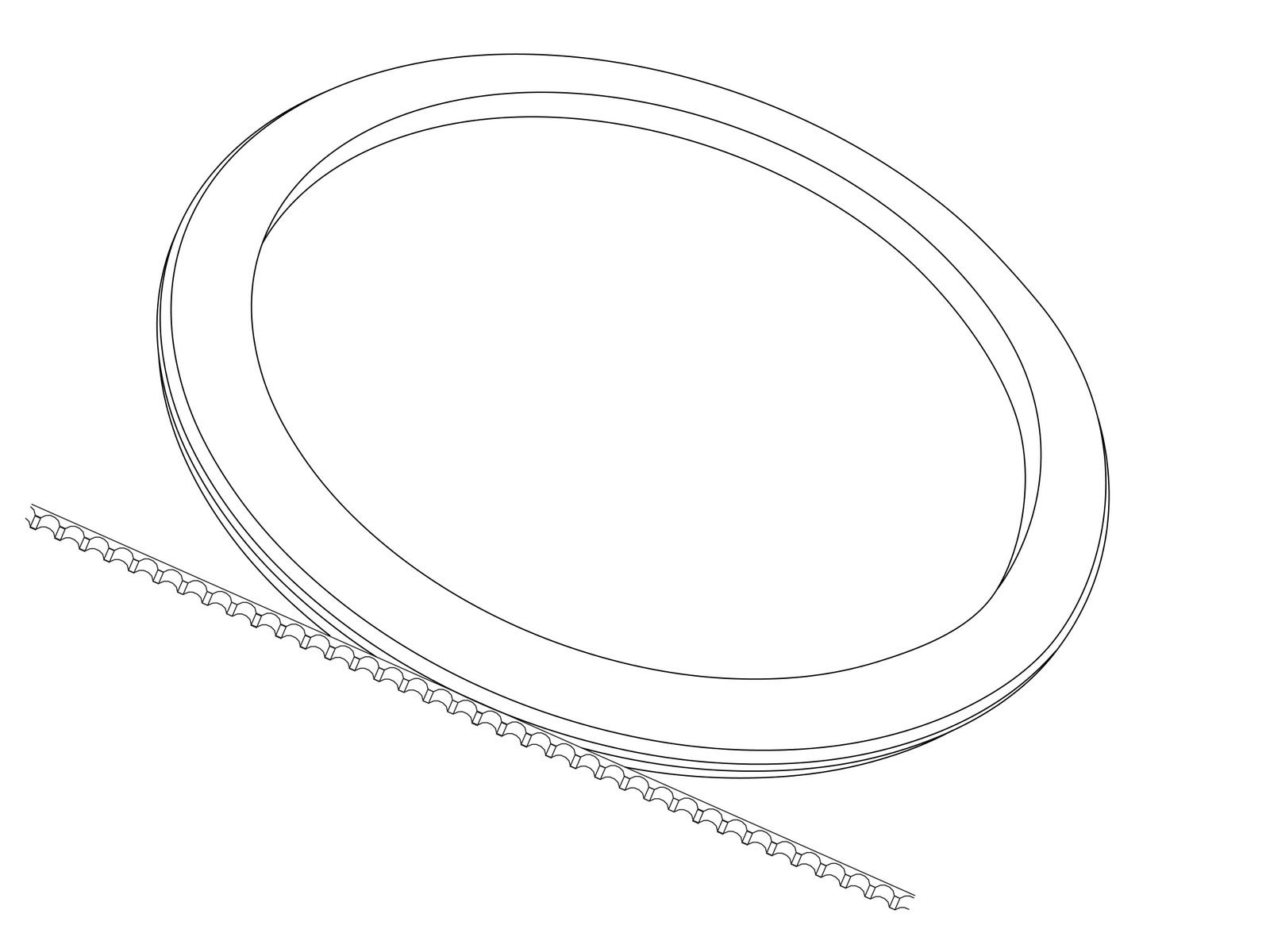
5) Une fois les feuillures réalisées, coller avec de la colle époxy, un morceau de courroie crantée sur les deux tiers du périmètre de la couronne, et sur la totalité du plateau.Le collage de cette courroie permet d’éviter un travail d’usinage compliqué à réaliser.
 Version des codes Alpha (encore pas mal de bugs)
Version des codes Alpha (encore pas mal de bugs)
#include <Stepper.h>
#define RAZ 12
#define PROXY_SENSOR 0
const int mem[29] = { // 0-29cm
621, //0
603, //1
594, //2
585, //3
576, //4
552, //5
525, //6
478, //7
417, //8
367, //9
335, //10
280, //11
267, //12
230, //13
210, //14
190, //15
173, //16
157, //17
144, //18
130, //19
120, //20
112, //21
100, //22
95, //23
85, //24
77, //25
70, //26
60, //27
58 //28
};
unsigned long val = 0;
int res = 0; // resultat
int cnt = 0;
// Les X et Y filtrÈs de l’image prÈcÈdente
int ofx;
// Les X et Y filtrÈs
int fx;
// La cible ‡ atteindre
int nx;
// Vitesse d’Èvolution
float sx;
// damp = frictions (1 = pas de frictions)
const float damp = 0.3;
// k = konstante de vitesse du filtre de mouvement
const float k = 0.3;
/// 4460x 180°
// 2270y 360°
// initialize of the Stepper library:
Stepper tete(200, 2,3, 4,5);
Stepper rouleau(200, 6, 7,8,9);
//Stepper rouleau(400, 2,3, 4,5);
// stock position (actuelle) de la pointe sur le matériau
int positionX = 0;
int positionY = 0;
// position voulue
int targetX = 0;
int targetY = 0;
// réception depuis le port série
char sInput[5];
int serInputByte = 0;
// capteur si nous sommes arrivés
boolean isArrived = false;
void setup() {
// set the motor speed
tete.setSpeed(45);
rouleau.setSpeed(45);
// Initialize the Serial port:
Serial.begin(9600);
ofx = fx = 0;
sx = 0;
val = 0;
for (int i=0; i<10; i++) {
val+=analogRead(0);
delayMicroseconds(360);
}
val = val/10;
// raz();
}
void loop() {
if (Serial.available()>0) {
char val = Serial.read();
if ((val!=’x’) && (val!=’y’)) {
sInput[serInputByte] = val;
if (serInputByte<5) {
serInputByte++;
}
else {
serInputByte = 0;
Serial.println(« ERROR MORE THAN 4 BYTES IN COMMUNICATION! »);
}
}
else {
int number = atoi(sInput);
if (val==’x’) targetX = number;
else
targetY = number;
isArrived = false;
serInputByte = 0;
sInput[0] = 0;
sInput[1] = 0;
sInput[2] = 0;
sInput[3] = 0;
sInput[4] = 0;
}
}
/// multitache pilotage des moteurs
int xTarg = targetX-positionX;
int yTarg = targetY-positionY;
if (xTarg!=0) {
if (xTarg>0) { // avance si plus petit
tete.step(1);
positionX++;
}
else { /// recule si plus grand
tete.step(-1);
positionX–;
}
}
if (yTarg!=0) {
if (yTarg>0) {
rouleau.step(1);
positionY++;
}
else {
rouleau.step(-1);
positionY–;
}
}
/// sync avec l’ordi, ça y est je suis arrivé
if ((xTarg==0)&&(yTarg==0)) {
if (isArrived!=true) {
// Serial.println(‘o’);
readAndSendSensorData();
}
isArrived = true;
}
/////////
if (cnt<20) {
cnt++;
}
else {
val = 0;
for (int i=0; i<10; i++) {
val+=analogRead(0);
delayMicroseconds(360);
}
val = val/10;
nx = val;
cnt = 0;
res = getMM();
//Serial.println(res);
sx = 0;
}
sx += (nx – fx) * k;
sx *= damp;
fx += sx;
ofx = fx;
// Serial.println(proxy); /// gimme height info
}
///1170
void readAndSendSensorData() {
Serial.println(res);
}
int getMM() {
int minA = 0;
int maxB = 0;
int minCm = 0;
int maxCm = 0;
for (int i=0; i<29; i++) {
int t = mem[i];
if (t<fx) {
maxB = t;
if (i>0) {
minA = mem[i-1];
minCm = i-1;
maxCm = i;
}
i = 29;
}
}
float result = mapF(fx, minA, maxB, minCm, maxCm);
return int(result*10.0);
}
float mapF(float value,
float istart, float istop,
float ostart, float ostop) {
return ostart + (ostop – ostart) * ((value – istart) / (istop – istart));
}
Version des codes Alpha (encore pas mal de bugs)
import processing.serial.*;
Serial myPort;
String numScanner = « »;
/// plateau
final int numberOfSteps = 40;
final int maxStepArduinoPlateau = 2270;
final int stepToSendPlateau = maxStepArduinoPlateau/numberOfSteps;
final int maxValueToTouchZero = 240;
int currentStep = 0;
/// head
final int numberOfHeightMeasures = 40;
final int maxStepArduinoHead = 4460;
final int stepToSendHead = maxStepArduinoHead/numberOfHeightMeasures;
int currentHeightStep = 0;
boolean stateLeftToRght = true;
boolean go = false;
boolean goPlateauTurn = false;
boolean goAndBack = true;
boolean finishHim = false;
/// x,y,z
float measuresXYZ[][][] = new float[numberOfSteps][numberOfHeightMeasures][3];
void setup() {
size(800,800,P3D);
// List all the available serial ports:
println(Serial.list());
// I know that the first port in the serial list on my mac
// is always my Keyspan adaptor, so I open Serial.list()[0].
// Open whatever port is the one you’re using.
myPort = new Serial(this, Serial.list()[0], 9600);
// prepareLists();
}
void draw() {
int input = 0;
if (finishHim!=true) {
String myString = « »;
while (myPort.available() > 0) {
myString = myPort.readStringUntil(10);
if (myString != null) {
String[] a = splitTokens(myString);
input = int(a[0]);
if (input>0) go = true;
// println(input);
}
}
}
background(30);
///iterate scanner
noStroke();
if (go) {
if (goAndBack) {
if (currentHeightStep<numberOfHeightMeasures-1) {
currentHeightStep++;
}
else {
goPlateauTurn = true;
goAndBack = false;
}
}
else {
if (currentHeightStep>0) {
currentHeightStep–;
}
else {
goPlateauTurn = true;
goAndBack = !goAndBack;
}
}
if ((currentStep<numberOfSteps-1) && (goPlateauTurn==true)) {
currentStep++;
goPlateauTurn = false;
}
else {
if (currentStep==numberOfSteps-1)
finishHim = true;
}
// give info
String xStr = str(currentHeightStep*stepToSendHead) + « x »;
String yStr = str(currentStep*stepToSendPlateau) + « y »;
// println(xStr + » » + yStr);
myPort.write(xStr);
myPort.write(yStr);
println(currentStep + « plateau » + currentHeightStep + » head »);
//println(input);
//calculate angles
float currentStepAngle = (TWO_PI/numberOfSteps) * float(currentStep); //plateau
float currentHeightAngle = (PI/numberOfHeightMeasures) * float(currentHeightStep); ///head
// get coordinates
float z = calculateZ(input, currentHeightAngle);
float x = calculateDistanceFromCenter(input, currentHeightAngle);
float y = 0.0;
// rotate coordinates in to the good angle, Z is constant
float xp = sin(currentStepAngle)*x;
float yp = cos(currentStepAngle)*x;
// put values into the memory
measuresXYZ[currentStep][currentHeightStep][0] = xp;
measuresXYZ[currentStep][currentHeightStep][1] = yp;
measuresXYZ[currentStep][currentHeightStep][2] = z;
go = false;
}
/// RENDER
/// view transformations
rotateX(0.8);
translate(width/2,0,-height/2);
fill(255);
for (int i = 0; i<numberOfSteps; i++) {
for (int j = 0; j<numberOfHeightMeasures; j++) {
pushMatrix();
translate(measuresXYZ[i][j][0], measuresXYZ[i][j][1], measuresXYZ[i][j][2]);
ellipse(0,0, 5,5);
popMatrix();
}
}
}
float calculateZ(int in, float angle) {
int c = maxValueToTouchZero-in;
return float(c)*sin(angle);
}
float calculateDistanceFromCenter(int in, float angle) {
int c = in-maxValueToTouchZero;
return float(c)*cos(angle);
}
void prepareLists() {
for (currentStep = 0; currentStep<numberOfSteps; currentStep++) {
for (currentHeightStep = 0; currentHeightStep<numberOfHeightMeasures; currentHeightStep++) {
//calculate angles
float currentStepAngle = (TWO_PI/numberOfSteps) * float(currentStep); //plateau
float currentHeightAngle = (PI/numberOfHeightMeasures) * float(currentHeightStep); ///head
// get coordinates
float z = calculateZ(100, currentHeightAngle);
float x = calculateDistanceFromCenter(100, currentHeightAngle);
float y = 0.0;
// rotate coordinates in to the good angle, Z is constant
float xp = sin(currentStepAngle)*x;
float yp = cos(currentStepAngle)*x;
// put values into the memory
measuresXYZ[currentStep][currentHeightStep][0] = xp;
measuresXYZ[currentStep][currentHeightStep][1] = yp;
measuresXYZ[currentStep][currentHeightStep][2] = z;
}
}
}





{kind=link}
{kind=link}