Paysage magnétique

Suite à la présentation que nous avons fait en présence d’un représentant de l’entreprise ABB, il s’est avéré que nous devions bien faire la part des choses entre l’objet que nous pourrions réaliser avec les moyens que nous avons à l’école, et le scénario que nous imaginons.
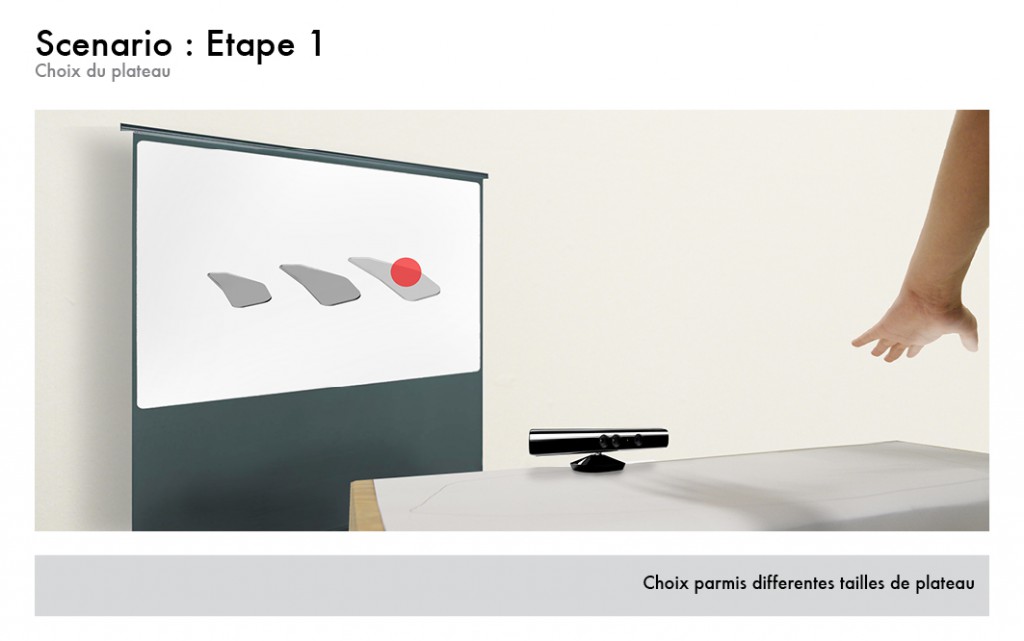
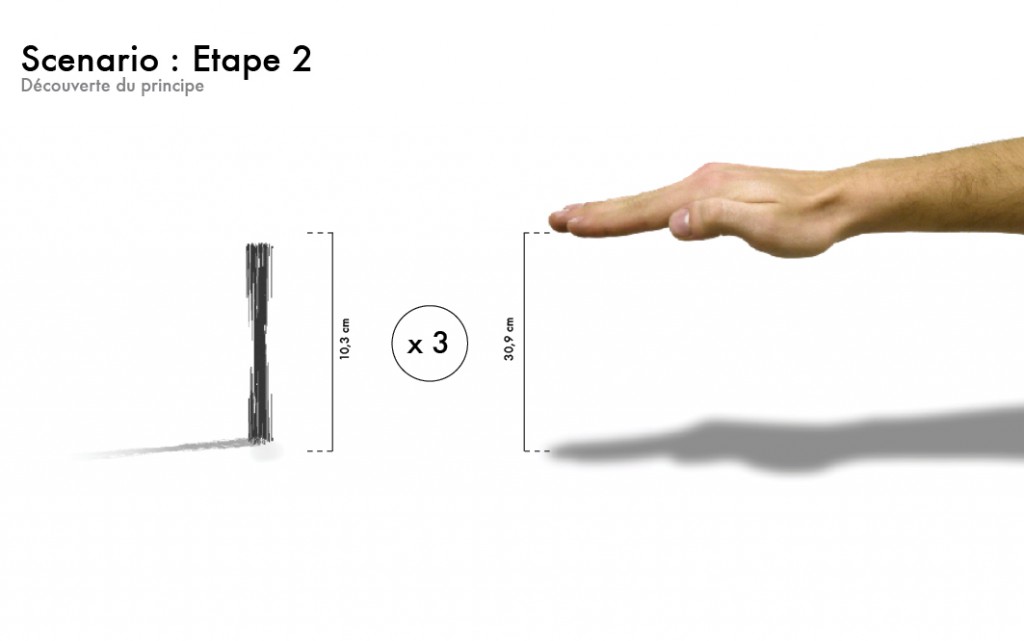
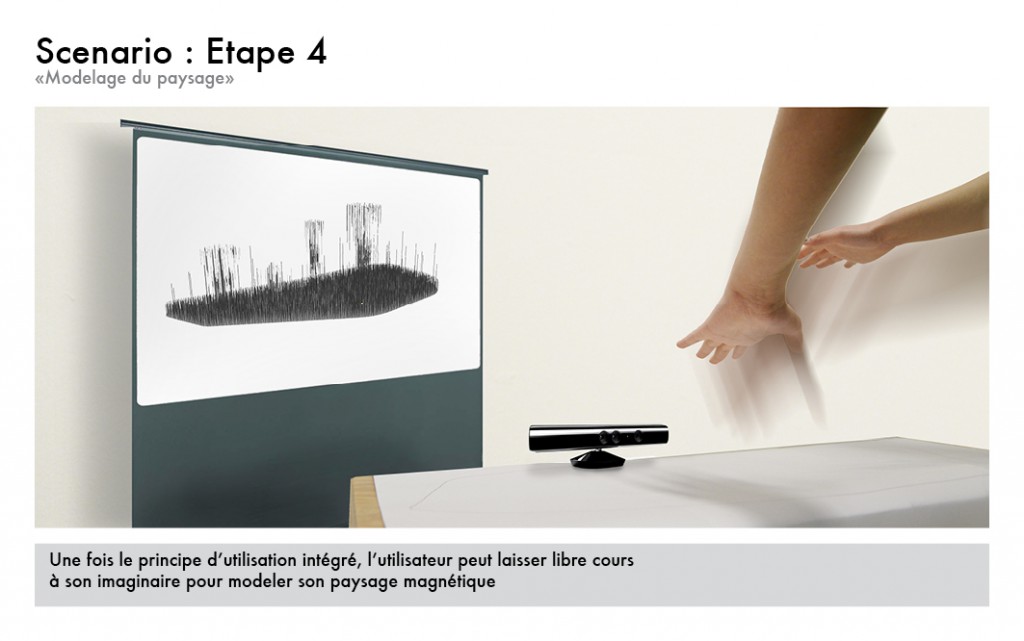
La première phase de réalisation se déroule donc face à KINECT. Apres un didacticiel, on est en mesure de jouer avec l’interface afin de modeler le paysage souhaité à savoir un paysage magnétique, un relief modelé virtuellement par l’utilisateur et réinterprété par le robot sous la forme d’un objet.
Il est apparu évident que nous ne pouvions nous cantonner à la création de « pieds »; mais que nous devions nous orienter vers un scénario plus complexe permettant une plus grande richesse formelle.
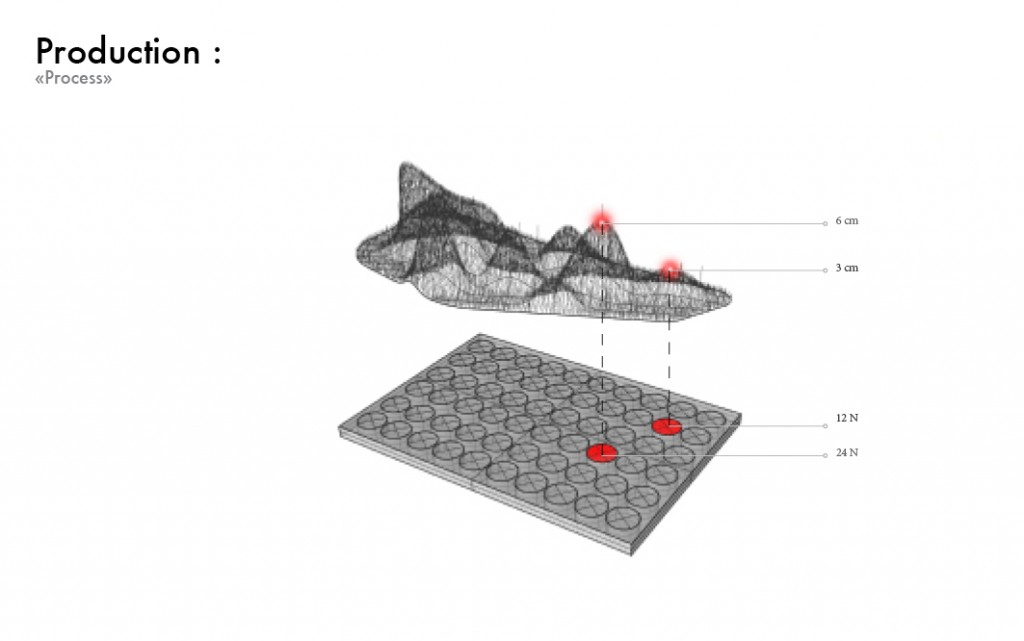
Pour cela, en plus du robot, un tapis d’électroaimants est placé sous le moule dans lequel est généré l’objet. Ce dernier va permettre de créer des pics de différentes hauteurs en fonction de la puissance fournie par chaque électroaimant ( celle ci variant proportionnellement à l’intensité du courant qui le traverse).
Deux possibilités sont envisageables pour la suite du process:
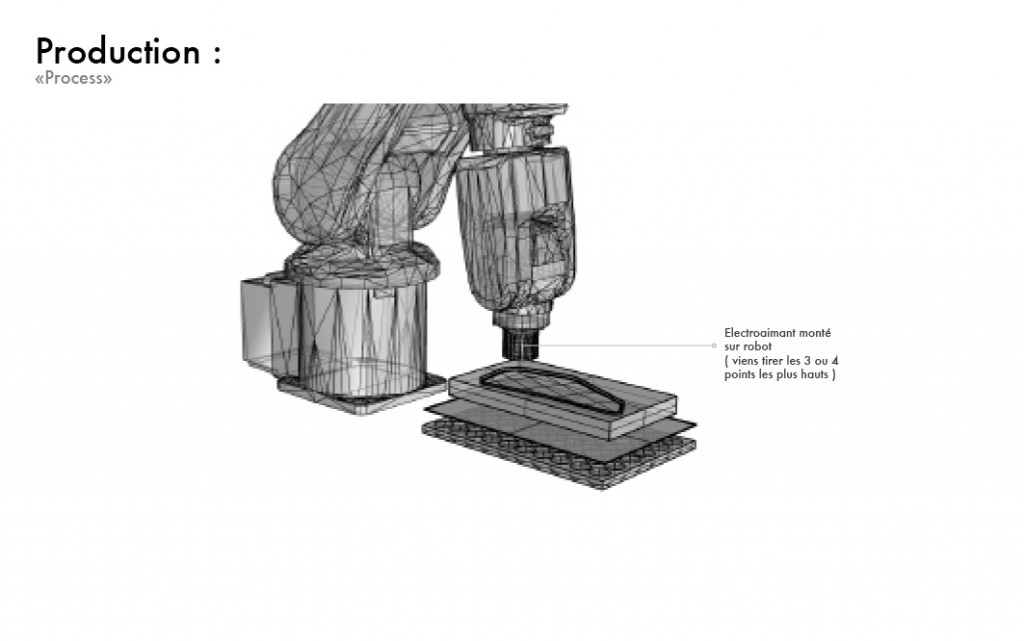
-Soit le robot, muni d’un électroaimant fait plusieurs passes au dessus du moule afin de tirer les pics à la hauteur voulue, et si cela ne suffit pas (problèmes de solidité et de stabilité ), le robot vient generer une ou plusieurs colonnes sur un même plan afin d’assurer la stabilité de l’objet.
-Soit le robot est lui aussi muni d’une matrice d’éléctroaimants qui va venir au contact de la matiere et qui en fonction de la puissance de chaque electroaimant crée soit des pics soit des colonnes reliant les deux surfaces (« les pieds » de l’objet)

Premier test réalisé à partir d’un moule à gateau en silicone.