
position de départ 1
Les vignettes jaunes permettent de suivre le mouvement d’une face référante. (Séquence bientôt disponible en Gif).


3

4

5
position de départ 1
Les vignettes jaunes permettent de suivre le mouvement d’une face référante. (Séquence bientôt disponible en Gif).
3
4
5
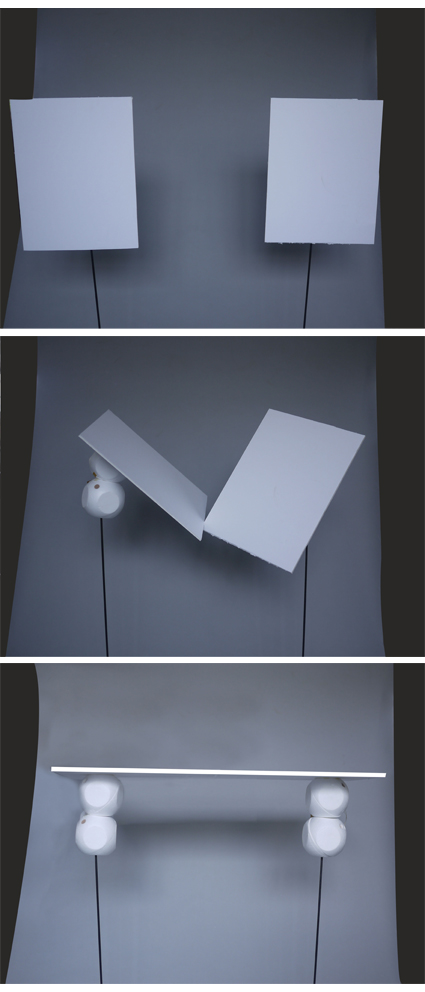
Mon postulat initial est d’utiliser les modules roombots comme éléments de liaisons permettant la mise en espace de composants inertes, l’orientation de plans, de surfaces tendues et autres éléments mobiles participant d’un dispositif « évolutif » et reconfigurable.
J’identifie la diversité des mouvements des modules et la temporalité de leurs reconfigurations, comme points de départ de ma recherche et m’intéresse au temps de la conférence, de la représentation publique ou de l’oral dans un lieu dit.
Au moment de l’exposé, en contexte d’entreprise, universitaire ou même muséographique.
Les robots seraient utilisés comme éléments motorisant le(s) dispositif(s) scénographique(s) de la représentation pour assurer les transitions entre les différents temps de l’exposé et suivant les différents supports de présentation (film – objets – objets papier – son).
Dans une sale de conférence programmée, ils orienteraient, par exemple, une table en écran de projection, assembleraient des stèles en surfaces plus grandes ou orienteraient un tableau vers l’assistance….
L’idée est de scénariser le moment de l’exposé comme un spectacle à effets spéciaux.
___________________________
État des lieux des différents dispositifs de l’exposé.

___________________________